در صورتیکه بخش های قبلی پروژه را مطالعه نکرده اید حتما به بخش اول (چگونه یک ربات بسازیم؟) مراجعه کنید و از ابتدا پروژه را مطالعه کنید.
بخش سوم –انتخاب نوع موتور محرک ربات
بعد از اینکه تصمیم گرفتیم که میخواهیم چه نوع رباتی بسازیم حال نوبت به انتخاب نوع موتور محرک ربات میرسد.
موتور محرک چیست؟
موتور محرک را می توان به عنوان وسیله ای تعریف کرد که انرژی (در رباتیک ، انرژی را به الکتریسیته تبدیل می کند) را به حرکت فیزیکی تبدیل می کند. اکثر موتورهای محرک یا حرکتی چرخشی یا خطی تولید می کنند. به عنوان مثال ، یک موتور DC یک نوع محرک است.
انتخاب موتور محرک مناسب برای ربات ، نیاز به شناخت درستی از موتورهای محرک موجود و همچنین نیاز کمی به دانش ریاضی و فیزیک داریم.
موتورهای محرک چرخشی
همانطور که از اسم شان مشخص است، این نوع محرک ها انرژی الکتریکی را به حرکت چرخشی تبدیل می کنند. دو پارامتر اصلی مکانیکی وجود دارد که آنها را از یکدیگر متمایز می کند: (1) گشتاور ، نیرویی که می توانند در مسافت معین تولید کنند (معمولاً در واحدN.m یاOz.in بیان می شوند) و (2) سرعت چرخش (معمولاً به صورت چرخش در دقیقه یا دور در دقیقه (rpm) تعریف می شود).
موتور محرک AC
موتورهای AC یا جریان متناوب به ندرت در ربات های متحرک مورد استفاده قرار می گیرد زیرا بیشتر آنها با جریان مستقیم (DC) از طریق باتری ها تغذیه می شوند. همچنین از آنجا که قطعات الکترونیکی از جریان DC استفاده می کنند، داشتن یک نوع منبع تغذیه DC برای موتورهای محرک نیز راحت تر است. موتورهای AC عمدتاً در محیطهای صنعتی که قدرت بسیار زیاد مورد نیاز است، یا جاییکه موتورها به پریز برق وصل هستند، مورد استفاده قرار می گیرند.

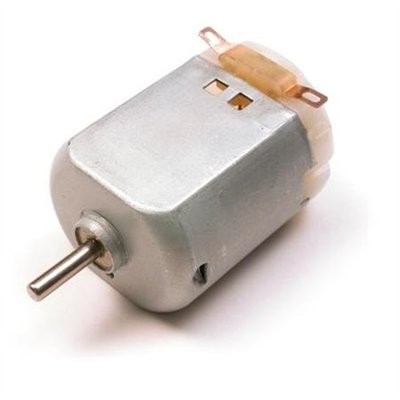
موتور محرک DC
موتورهای DC در اشکال مختلفی وجود دارند البته بیشتر استوانه ای شکل هستند.دارای یک شافت خروجی هستند که معمولاً با سرعت زیاد در حدود (10000-5000) دور در دقیقه می چرخند.اگرچه موتورهایDC به طور کلی خیلی سریع می چرخند، اما اکثر آنها قدرتشان ( گشتاور ) کم است. به منظور کاهش سرعت و افزایش قدرت ، می توان یک چرخ دنده اضافه کرد.
برای وارد کردن موتور چرخدنده در ربات ، باید بدنه موتور را به قاب ربات ثابت کنید.به همین دلیل موتورها غالباً دارای سوراخ های نصب هستند که معمولاً در قسمت جلوی آن قرار دارند تا بتوانند به صورت عمود بر روی یک سطح نصب شوند.موتورهایDC می توانند در چرخش جهت عقربه های ساعت(CW) و خلاف جهت عقربه های ساعت(CCW) کار کنند. سرعت چرخش شافت و اطلاعات موقعیت مکانی را می توان با استفاده از شفت انکودر یا پتانسیومتر اندازه گیری کرد.
موتور گیربکس DC
هدف موتور گیربکس DC کاهش سرعت و افزایش قدرت می باشد. متداول ترین انواع چرخ دنده ها “spur” یا همان چرخ دنده های ساده می باشد، چرخ دنده سیاره ای (پیچیده تر هستند اما به نسبت مدل های دیگر سرعت را بیشتر کاهش می دهند و به گیربکس کاهنده نیز شهرت دارند) و چرخ دنده حلزونی (که در صورتیکه قدرت کافی نداشته باشد اجازه نمی دهد که شافت حرکت کند) و همچنین همانند موتور DC ، موتور گیربکس DC نیز می تواند ساعتگرد و پادساعتگرد بچرخد. اگر بخواهید از تعداد چرخش آن مطلع شوید، میتوانید از یک شفت انکودر استفاده کنید و آن را به شافت وصل کنید.

سروو موتور
سروو موتورها از انواع محرک هایی هستند که در یک زاویه خاصی می چرخند و در وسائل کنترل از راه دور برای فرمان یا کنترل سطوح پرواز استفاده می شوند. البته در حال حاضر در وسائل مختلفی کاربرد دارند و قیمت آنها بسیار کاهش یافته است. تنوع سروو موتورها از نظر اندازه ، فناوری و قدرت افزایش یافته است. اکثر آنها فقط در حدود 180 درجه می چرخند.
سروو موتور در حقیقت شامل یک موتورDC ، گیربکس ، قطعات الکترونیکی و یک پتانسیومتر (که زاویه را اندازه می گیرد) است. قطعات الکترونیکی و پتانسیومتر با هم برای فعال کردن موتور و متوقف کردن شافت خروجی در یک زاویه مشخص کار می کنند. سروو موتورها به طور کلی سه کابل دارند که شامل زمین ، ولتاژ ورودی و ضربان کنترل می باشد. ضربان کنترل توسط سروو موتور تولید می شود.
“سروو موتور R/C” نوع جدیدی از سروو موتورها می باشد که هم چرخش مداوم و هم اطلاعاتی از موقعیت را ارائه می دهد و در رباتها کاربرد دارند. همه سرو ها می توانند به صورت ساعتگرد و پادساعتگرد بچرخند.

سروو موتور صنعتی
سروو موتور صنعتی نسبت به انواع دیگر متفاوت است و عموما در ماشین آلات بزرگ به کار می رود. یک سروو موتور صنعتی از یک موتور ACبزرگ، یک چرخدنده کاهنده و یک انکودر که سرعت زاویه ای و اطلاعاتی از موقعیت را مشخص می کند تشکیل شده است.
این موتورها به دلیل وزن، سایز، قیمت و پیچیدگی شان در رباتهای متحرک به کار میروند. سروو موتورهای صنعتی ممکن است که در رباتهای بازودار و دستگیره دار و یا رباتهای خیلی بزرگ یافت شوند.

استپ موتور
یک استپ موتور همانطور که اسمش مشخص است، چرخش آن به صورت مرحله ای است و در واقع در درجات معینی می چرخد. اکثر استپ موتورها چرخدنده ندارند، به همین دلیل همانند موتورهای DC قدرت پایینی دارند.
استپ موتورها هم به صورت ساعتگرد و هم پادساعتگرد می چرخند و همچنین می توانند در زوایای مختلفی بچرخند. استپ موتورها در دو نوع تک قطبی و دو قطبی وجود دارند. نکته قابل توجه در مورد استپ موتورها این است که اگر قدرت کافی نداشته باشد، نمی توان از زاویه شروع حرکت مطمئن شد.
اگر به استپ موتور چرخدنده اضافه کنید همانند موتورهای DC عمل می کند، به طوریکه قدرت را افزایش داده و سرعت زاویه را کاهش می دهد و به آن استپ موتور گیربکس دار نیز می گویند. از آنجا که سرعت چرخدنده کاهش می یابد، سرعت استپ موتور نیز کاهش می یابد. اگر استپ موتور بدون چرخدنده با زاویه ی 1.2 درجه باشد و چرخدنده ی 55:1 را به آن اضافه کنید، اندازه زاویه جدید (0.0218 = ( 55 / 1.2) )خواهد بود.

موتور محرک خطی
یک موتور محرک خطی در یک خط مستقیم حرکت می کند و از سه معیار مکانیکی متفاوت تشکیل شده که شامل حداقل و حداکثر فاصله میله ( در واحد میلی متر یا اینچ ) ، نیرو (در واحد کیلوگرم یا پوند) و سرعت (در واحد m / sیا inch / s) می باشد.
موتور محرک خطی DC
یک موتور محرک خطی DC معمولا از یک موتور DC که به یک پیچ لید اسکرو متصل شده، ساخته شده است که با چرخش موتور پیچ لید اسکرو نیز میچرخد. مهره خطی روی پیچ لید اسکرو نیز در جهت و یا خلاف جهت حرکت موتور نیرو وارد می کند، در واقع حرکت چرخشی را به یک حرکت خطی تبدیل می کند.
برخی از موتورهای محرک خطی DC دارای یک پتانسیومتر خطی هستند که موقعیت ربات را بیان می کنند.
بسیاری از تولید کنندگان جهت جلوگیری از خرابی موتور، کلیدی را در انتهای آن قرار می دهند تا با فشار دادن این کلید نیروی وارد بر موتور را قطع کنند. محرک های خطی DC در اندازه ، سکته مغزی و نیرو در طیف گسترده ای قرار می گیرند. موتورهای خطی DC در اندازه و حجم و قدرت های متفاوتی وجود دارند.

سلنوئید
سلنوئید از یک سیم لاکی و هسته متحرک تشکیل شده است. هنگامیکه نیرو وارد سیم لاکی می شود، هسته از میدان مغناطیسی دور می شود و حرکتی را در یک جهت تولید می کند. برای اینکه حرکت در دو جهت تولید شود یا باید از چند سیم لاکی استفاده کرد یا اینکه یکسری تمهیدات مکانیکی اعمال شود.
فشار تولیدی یک سلنوئید معمولا بسیار کم است اما سرعتش بسیار بالا است. قدرت سلنوئید عمدتا به اندازه سیم لاکی و جریانی که از آن عبور میکند، بستگی دارد. کاربرد سلنوئیدها عموما در شیر برقی می باشد.

سیم عضلانی
این نوع سیم همانند عضلات داخل بدن عمل می کند به طوریکه با عبور جریان از آن، منقبض و کوچک می شود و هر زمان که جریان به طور کامل از آن عبور کند و کابل خنک شود به حالت اولیه اش برمی گردد.
این نوع سیم ها خیلی محکم نیستند ولی فشار و نیروی زیادی به موتور می دهند. کار با این سیم ها بسیار راحت است و خصوصا در موتور ربات کاربرد دارند.

موتور محرک هیدرولیک –پنوماتیک
موتور محرک هیدرولیک –پنوماتیک برای انتقال نیرو از هوا یا یک نوع مایع (فرضا آب یا نفت) استفاده می کند. این نوع محرکها فشار، قدرت و سرعت زیای تولید می کنند.
برای تولید انرژی نیاز به یک نوع مایع دارند به همین دلیل کار با آنها سختتر است و به دلیل سایز بزرگ و قدرت تولیدی عظیمی که دارند اساسا در محیطهای صنعتی کاربرد دارند.

کدام نوع موتور محرک را انتخاب کنیم؟
برای اینکه بتوانید موتور محرک درستی را انتخاب کنید ، سوالاتی را برای شما آماده کرده ایم. توجه به این نکته ضروری است که همیشه فناوری های جدید به بازار عرضه می شوند. همچنین توجه داشته باشید که یک موتور محرک ممکن است وظایف بسیار متفاوتی را در زمینه های مختلف انجام دهد. به طور مثال، با اندکی تمهیدات مکانیکی اضافی، ممکن است از یک موتور محرک تولید کننده حرکت خطی برای چرخاندن یک جسم و برعکس استفاده شود ( مانند برف پاک کن شیشه جلو اتومبیل ).
- آیا موتور محرک قرار است برای به حرکت درآوردن یک ربات چرخدار استفاده گردد؟
موتورهای محرک باید وزن کل ربات را به حرکت درآورند و به یک چرخدنده کاهنده نیاز دارند. اکثر روباتها از سیستم فرمان کشویی استفاده می کنند در حالیکه در رباتهای اتومبیل یا کامیون از سیستم جعبه فرمان معمولی استفاده می شود.
اگر میخواهید از سیستم فرمان کشویی برای ربات چرخدار استفاده کنید، بهتر است که از موتورهای DC استفاده کنید زیرا باعث چرخش مدارم چرخها می شود، همچنین اطلاعاتی از موقعیت مکانی ارائه می کند و برنامه نویسی و استفاده از آن بسیار ساده می باشد.
اگر می خواهید از سیستم جعبه فرمان معمولی استفاده کنید، به یک موتور DC و یک موتور برای هدایت چرخ های جلو نیز نیاز دارید. از آنجا که چرخش مورد نیاز چرخها به یک زاویه خاص محدود می شود، یک سروو موتور R/C گزینه منطقی خواهد بود.

- آیا موتور محرک قرار است برای بلند کردن یا چرخاندن اجسام سنگین استفاده گردد؟
بلند کردن اجسام سنگین قطعا به قدرت بیشتری نسبت به نیرویی که فقط برای حرکت یک ربات روی سطح صاف لازم است، احتیاج داریم. برای به دست آوردن قدرت باید سرعت قربانی شود.
برای این منظور بهتر است که از یک گیربکس و یک موتور قدرتمند DC یا یک موتور محرک خطی DCاستفاده کنید. دقت کنید که از سیستم موتور با گیربکس حلزونی یا با رابط استفاده کنید تا در صورتیکه یک بخش از کار افتاد، کل سیستم غیرفعال نشود.

- آیا دامنه حرکت محدود به 180 درجه می باشد؟
اگر دامنه حرکت محدود به 180 درجه می باشد و قدرت مورد نیاز زیاد نباشد؛ یک سروو موتور R/C انتخاب مناسبی است. سروو موتورها در اندازه های مختلفی هستند و میزان قدرت تولیدی شان متفاوت است و همچنین میزان زاویه حرکتی موتور را ارائه می دهند.
اکثر سروو موتورها برای ارائه زاویه حرکت از پتانسیومتر استفاده می کنند هرچند برخی از آنها از انکودر استفاده می کنند. بیشترین کاربرد سروو موتور R/C در ساخت رباتهای کوچک پادار می باشد.

- آیا زاویه چرخش باید خیلی دقیق باشد؟
استپ موتورها می توانند زوایای حرکت را کاملا دقیق ارائه دهند و به دلیل اینکه نیروی چرخشی مداومی را ایجاد می کنند گاهی اوقات به جای سروو موتورها از آنها استفاده می شود. البته برخی از سروو موتورها از انکودر استفاده می کنند و دقت زاویه ای بسیار بالاتری ارائه می دهند.

- آیا حرکت ربات در یک خط مستقیم است؟
موتورهای محرک خطی برای حرکت رباتها در یک خط مستقیم بسیار عالی هستند. این موتورها در اندازه و اشکال متنوعی وجود دارند. از سیم عضلانی تنها زمانیکه نیاز به نیروی کمی برای حرکت دارید، استفاده کنید. برای حرکتهای بسیار سریع ، از موتورهای پنوماتیک یا سلنوئید استفاده کنید و اگر به قدرت بسیار زیادی نیاز دارید، ابتدا از موتور محرک خطی DC (با قدرت حداکثر 500 پوند) و سپس از موتور هیدرولیک استفاده کنید.

ابزار و نرم افزارهای مورد نیاز
برای محاسبه قدرت (یا گشتاور) و سرعت مورد نیاز برنامه شما ، محاسبات زیادی مورد نیاز است. ابزارهای مورد نیاز پروژه در زیر آورده شده است:
- DC Drive Motor Selector: (کاربرد آن در رباتهای چرخدار و زنجیری می باشد). همچنین برای اطلاعات بیشتر Drive Motor Sizing Tutorial را نیز مطالعه کنید.
- Robot Leg Torque Tutorial
- Robot Arm Torque Calculator
مثال عملی
در بخش اول مفهوم رباتهای متحرک و میزان بودجه لازم برای ساخت آنها را بیان کردیم و در بخش دوم تصمیم به ساخت یک تانک کوچک ( ربات زنجیری کوچک ) که بتواند روی میز حرکت کند، گرفتیم.
در این بخش قصد داریم که نوع موتور ربات را تعیین کنیم و برای این منظور ابتدا باید به سوالات زیر پاسخ دهیم:
- آیا موتور مورد نظر ما قرار است برای به حرکت در آوردن ربات زنجیردار استفاده شود؟
- بله درست است و باید از یک موتور DC استفاده شود و همچنین از فرمان کشویی که برای تانک مناسب می باشد، استفاده کنید و در واقع هر زنجیر یک موتور نیاز دارد.
- آیا قرار است که موتور مورد نظر برای بلند کردن اجسام سنگین استفاده گردد؟
- خیر، یک تانک کوچک رومیزی سبک است.
- آیا زاویه حرکت به 180 درجه محدود است؟
- خیر، چرخها باید به طور کامل بچرخند.
- آیا زاویه حرکت باید دقیق باشد؟
- خیر، رباتی که ما میخواهیم بسازیم نیازی به اطلاعات موقعیت مکانی ندارد.
- آیا حرکت ربات به صورت یک خط مستقیم است؟
- خیر، می خواهیم که ربات مان در تمامی جهت ها حرکت کند و بچرخد.
از آنجاییکه چرخش چرخها نیاز به حرکت چرخشی دارد، به سرعت می توانید تمامی موتورهای خطی را از لیست حذف کنید و یک موتور DC انتخاب کنید.
سوال بعدی انتخاب نوع چرخهای زنجیری ( یا شاسی ربات تانک ) برای ربات تانک است که با توجه به اینکه ربات ما کوچک است باید چرخهای زنجیری کوچکی برای آن انتخاب کنیم.
انواع چرخهای زنجیری ( شاسی ربات تانک ) مناسب برای رباتهای تانک
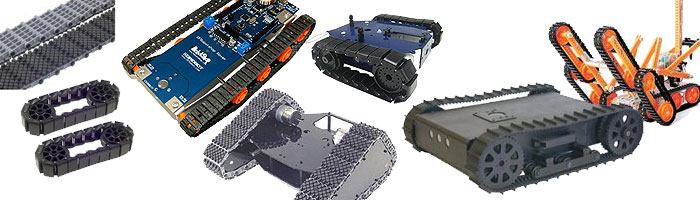
ما در این پروژه به دلیل کارایی موتور رباتی که میخواهیم از آن استفاده کنیم و زیبایی و قیمت مناسب، چرخهای زیر را به عنوان چرخ ربات مان انتخاب کردیم. البته شما می توانید هر مدل دیگری را با توجه به اندازه ربات، بودجه تان و کارایی موتور ربات ، بکار بگیرید.

محاسبه معیارهای مورد نیاز موتور محرک ربات
حال باید با استفاده از مقادیر محاسبه شده، ورودی های نرم افزار DC Drive Motor Selector Tool را تکمیل نماییم تا به خروجی مناسب که معیارهای مورد نیاز برای انتخاب یک موتور محرک مناسب است دست بیابیم.
مقادیر ورودی پروژه ما به صورت زیر می باشد که در نرم افزار وارد کرده ایم:
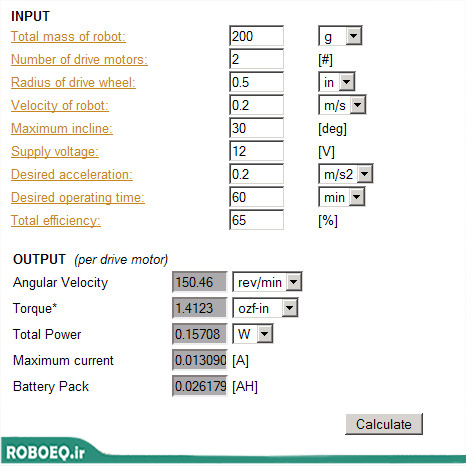
داده های ورودی
- مقدار کل وزن ربات : 200 گرم می باشد که شامل موتورها ، قاب ربات ، باتریها و… کل ربات است.
- تعداد درایور موتور به کار رفته : برای فرمان کشویی دو عدد موتور نیاز است.
- شعاع چرخ : حدودا (1-0.5) برای یک ربات رومیزی اندازه مناسبی است.
- سرعت ربات : 0.2 متر بر ثانیه برای ربات رومیزی مناسب است.
- شیب حداکثر : کافیست ربات ما بتواند از روی چند کتاب بالا برود، پس ما همان مقدار پیش فرض یعنی 12 ولت را انتخاب می کنیم.
- ولتاژ تأمین (منبع تغذیه) : همان مقدار پیش فرض یعنی ( 12 ولت ) باشد.
- شتاب مناسب : همان مقدار پیش فرض یعنی ( 0.2 متر بر مجذور ثانیه ) باشد.
- میزان زمان عملکرد ربات : 30 دقیقه برای هر بار که آن را به شارژ وصل کنید.
- کارایی کل : همان مقدار پیش فرض یعنی 65% باشد.
انتخاب موتور با توجه به نتایج بدست آمده
با توجه به مقادیر بدست آمده برای سرعت زاویه ای ، قدرت ، نیروی گشتاور ، بیشترین جریان و باتری مناسب برای این پروژه به این نتیجه رسیدیم که از یک جفت موتور گیربکس 6 و 3 ولت پلاستیکی برای حرکت ربات استفاده کنیم.
هر چند نرم افزار مورد استفاده در این پروژه میزان سرعت مناسب را 150 دور در دقیقه تعیین کرده ولی ما به دلیل کم کردن هزینه ها این مورد را انتخاب کردیم و خب احتمالا سرعت حرکت ربات پایین تر خواهد آمد. قدرتی که این موتور تولید می کند خیلی بیشتر از مقداری است که نرم افزار نشان می دهد و سبب شده که ربات ما بتواند کارهای دیگری مثل حمل بار اضافی یا بالا رفتن از یک شیب تند را نیز انجام دهد.
ادامه این پروژه را در بخش چهارم ( میکروکنترلر و کاربرد آن در ساخت ربات) مطالعه کنید.






{kind=link}