
در طراحی یک ربات، انتخاب موتور مناسب مسئله مهمی است. ما در اینجا نکات مربوط به مشخصات موتور و چرخ دندهی مناسب را بررسی می کنیم.
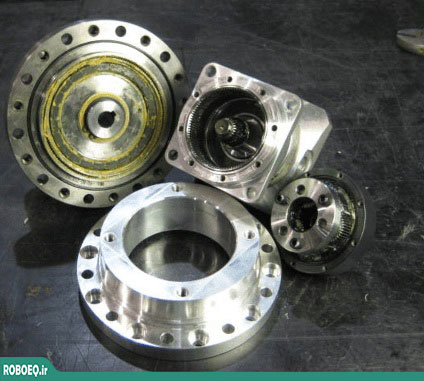
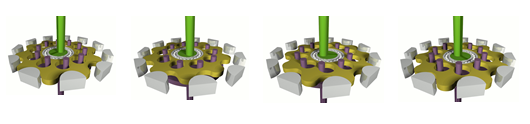
تصویر بالا یک چرخ دنده سیارهای [1] و هارمونیک [2] را نشان می دهد که به یکدیگر کوپل شده اند.
تصویر زیر یک موتور براشلس (بدون جاروبک) به همراه یک رزولور [3] که در قسمت ورودی سیمها قرار دارد را نشان میدهد.

گام نخست
اولین مرحله برای انتخاب موتور ربات، تعیین موقعیتهای عملیاتی و ماکزیمم شرایطی است که موتور در آن قرار خواهد گرفت.
- نیروی وارده بر ربات (یا نیروی واقعی وارد شده بر ربات)
برای تعیین گشتاور مورد نیاز موتور، لازم است میزان بار وارده را بدانیم. بدست آوردن تخمینی از نیروی وارده بر ربات در انتخاب موتور ضروری است ( چه بهتر که میزان واقعی را بدانیم). اگر طراحی بر پایه بار تخمینی صورت میگیرد باید حاشیه خوبی برای افزایش بار در نظر گرفته شود. با بررسی گشتاور ثابت از روی دیتا شیت موتور میتوان به مقدار گشتاور بدست آمده به ازای هر آمپر پی برد.
- سرعت
عامل بعدی که در انتخاب موتور باید لحاظ شود، تعیین سرعت مورد نیاز برای چرخش چرخ است. ابتدا باید سرعت مطلوب چرخ (خروجی نهایی) تعیین گردد و پس از آن موتور ها و چرخ دنده ها انتخاب گردند.
- شکل و اندازه
بعد از تعیین مشخصه های عملکردی موتور لازم است از امکان قرار گیری مجموعه موتور( انکودر، ترمز، موتور، چرخدندهها) در ربات اطمینان حاصل کنید.
- ولتاژ
ولتاژ عملیاتی می تواند برای حرکت موتور بکار رود. معمولا ولتاژ بالاتر، سرعت بالاتر موتور را به همراه دارد. ولتاژ ثابت دیتا شیت موتور، میزان سرعت در هر ولت را نشان می دهد.
- دما
در اکثر موارد دما مسئله مهمی نیست. اما اگر موتور شما محصور است باید مطمئن شوید که دمای آن بالا نمی رود. همچنین برای محدود کردن دما، نسبت به روانکاری گیربکس حساس باشید.
- هزینه
بعضی اوقات وسوسه می شویم برای صرفه جوئی اقتصادی خودمان گیربکس را بسازیم. با وجود اینکه زمانی را صرف طراحی، سوار کردن و تست چرخ دنده می کنیم، غالبا از خرید یک گیربکس ارزانتر تمام میشود. اما خرید گیربکس از یک شرکت معتبر ضریب اطمینان بیشتری دارد.
- صحت و دقت
چه مقدار میتوان در چرخ دنده ها لقی [4] داشته باشیم؟ در اغلب موارد کاهش دقت، مشکلی در روند کار ایجاد نمیکند. اما در صنعت یا بازوی ربات سیستمهای دقیقی نیاز است که لقی کمی دارند.
- قطر چرخ
آخرین نکته مهم، تعیین گشتاور مورد نیاز برای محرکه موتور است. به خاطر داشته باشید چرخ بزرگتر مسافت بیشتری را در هر دور طی می کند.
تعیین گشتاور مطلوب
به طور معمول آسانترین راه، تعیین گشتاور خروجی مطلوب و انجام مهندسی معکوس برای موتور و چرخ دنده است. از اینرسی که در مواردی باعث محدود شدن گشتاور میشود، صرفنظر میکنیم. در بیشتر موارد باید نسبت به حذف اینرسیمحتاط باشید. در هنگام محاسبه حاشیه مطمئنی را به آن اضافه کنید.
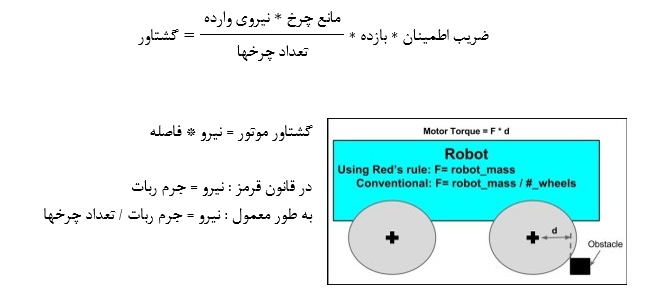
برای تعیین گشتاور مورد نیاز ربات چند نظریه وجود دارد. نظریه اول قانون قرمزها ست که مشخص می کند چه میزان هر چرخ باید کشیده شود که بتواند کل ربات را بکشد. در شرایطی که بعضی از محرکها در عمل شکست بخورند یا بلغزند در روند کل ربات مشکلی بوجود نمی آید اما اگر چرخها در جهات مختلفی حرکت کنند این امکان وجود دارد که ربات از هم جدا شود.
مشکل دیگر این روش این است که حتی اگر موتورها بتوانند گشتاور زیادی اعمال کنند غالبا اصطکاک کافی برای کشش و عمل چرخها وجود ندارد.
روش دوم، طراحی ربات با میزان کافی گشتاوری است که بتواند از دیوار بالا برود. این روش میزان گشتاور را در شیبهای تند و پله، با خطر کم برای ربات، بدون واکنش شدید و همچنین فراتر از طراحی ربات متحرک شبیه سازی می کند.
ممکن است فرض شود تعداد چرخها = تعداد چرخها تقسیم بر دو
اگر روش نقطه بحرانی را بکار ببرید باید همهی چرخ ها را در نظر بگیرید، نمی توانید از نصف آن صرف نظر کنید. از طرفی فقط بالارفتن از شیب مد نظر نیست، از پله نیز باید عبور کند. با احتیاط می توانید مسئله را با حل لحظه ای که چرخ ربات با مانع مواجه می شود(برخورد کردن)، ساده و محاسبه کنید.
اگر می خواهید بالارفتن از شیب را شبیه سازی کنید می توانید مانع را با شعاع چرخ تنظیم کنید.
استفاده از روش شیب یا روش مانع پله به انتخاب شماست. در ربات میدانی، شیب و گشتاور نگهدارنده [5] برای سطوح صاف در نظر گرفته می شوند. در رباتهای داخلی ممکن است موانع کوچکتر در نظر گرفته شود که چرخ باید از آن بالابرود.
منحنی سرعت گشتاور ( قدرت)
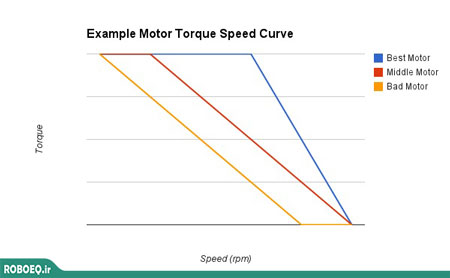
در این مثال منحنی های سرعت- گشتاور یک موتور خوب، متوسط و بد نشان داده شده است. در بهترین منحنی، امکان حفظ گشتاور مناسب در محدوده وسیعی از سرعت وجود دارد و در انتهای محدوده افت میکند. در صورتیکه در منحنی موتور بد، گشتاور با سرعت کاهش پیدا می کند، یک گشتاور نگهدارنده بالا تامین می شود اما عملکرد گشتاور هنگام چرخش ضعیف است.
وقتی گشتاور مورد نیازتان را بدانید می توانید در دیتا شیت موتورها به دنبال منحنی گشتاور- سرعت بگردید. برای انتخاب موتور و گیربکس مناسب می توانید یک ماتریس از تفاوت گزینه ها برای مشخص شدن گشتاور سرعت مورد نیاز بسازید. یک ایده خوب، رسم منحنی سرعت گشتاور برای هر یک از گزینه های نهایی است.
برای ترسیم منحنی سرعت گشتاور جدید یا نهایی به صورت زیر عمل می شود:
گشتاور نهائی = گشتاور موتور * شعاع چرخ دنده * ضریب اطمینان چرخ دنده
هر نوع چرخ دنده یک ضریب اطمینان متفاوت دارد که با سرعت تغییر می کند.
برای تعیین قدرت موتور ( از آنجا که تعدادی از کنترل کننده های موتور با قدرت خروجی رده بندی می شوند) نقطه ای از منحنی سرعت گشتاور را شما اعمال می کنید پیدا کرده و قدرت را از فرمول زیر بدست آورید.
قدرت = گشتاور * سرعت
چرخ دنده
استفاده از سه نوع چرخ دنده در رباتها رایج است:
ویژگیهای چرخ دنده های هارمونیک
- بازده 60-80 درصد
- لقی پایین
- مناسب کاربردهایی با سرعت پایین و گشتاور بالا
- نسبت تبدیل بالا به سایز گیربکس
- نا مناسب برای نیرویی که به طور ناگهانی تغییر کند
ویژگیهای چرخ دنده های سیاره ای
- بازدهای بهتری نسبت به هارمونیک دارند، در بعضی موارد بالای 90 در صد.
- از دیگر گزینه ها ارزان قیمت تر هستند
- نسبت پایین تبدیل به سایز گیربکس
- مناسب کاربردهایی با گشتاور پایین و سرعت بالا
ویژگیهای چرخ دنده های سیکوئیدی [6]
- بزرگتر از بقیه
- مناسب برای نیروی ضربه ای و متغیر
- نسبت تبدیل بالا به سایز گیربکس
- بازده آن حدود 80 درصد
در بسیاری از موارد چند نوع چرخ دنده در یک سیستم به کار میرود. برای مثال چرخ دنده هارمونیک سرعت ورودی پایینی دارد، معمولا یک چرخ دنده سیاره ای بین آن و موتور قرار می گیرد تا سرعت ورودی سراسری کاهش یابد.
روانکاری
بیشتر دو نوع روان کاری در گیربکس استفاده می شود.
گریس
- آسان، گزینه پیش فرض
- امکان دارد سرعت موتور را محدود کند
- تنظیم و فراموشی ( نیازی نیست که مجد گریس کاری شود)
- می تواند مانع کثیفی گیربکس شود. ( توصیه می شود که محفظه چرخ دنده بسته شود اما الزامی برای این کار نیست)
روغن
- سطوح مرتب باید بررسی شده و مجدد روغنکاری گردد.
- سرعت بالا امکان پذیر است
- در مقایسه با گریس بازدهی پایین تری دارد
بهتر است در این مورد با سازنده مشورت کنید. گریس انواع مختلفی دارد که می توان با توجه به ویژگی کار از آن استفاده کرد. مثل ویژگیهای حرارتی
هشدارها:
- مطمئن شوید اتصال موتور به گیربکس می تواند انحرافهای کوچک (دور از مرکز) در شفت موتور تحمل کند.
- به چگونگی انتقال گشتاور از موتور به چرخ توجه کنید. برای مثال یک موتور ممکن است فقط یک شفت داشته باشد در حالیکه یک هارمونیک درایو دارای یک صفحه دایره ای با چندین موقعیت پیچ است.
- اتصالات مجموعه موتور به چرخ را بررسی کنید. در بیشتر موارد افراد اتصالاتی را انتخاب میکنند که به اندازه کافی برای گشتاور مورد نظر محکم نیست تا انتقال انجام شود.
- اگر می خواهید ترمز یا انکدر / رزولور در موتور استفاده کنید، موتور شما باید یک شفت عقب داشته باشد. برای استفاده از انکودر و ترمز باهم لازم است با سازنده در مورد گزینه هایتان مشورت کنید. این موضوع را حل شده فرض نکنید.
[1]








{kind=link}
۲ دیدگاه. Leave new
سلام و درود
مطالب وبگاه شما رو می خونم خیلی خوب و جذابه. در نظر دارم یه ربات کاربردی بسازم اما نمی دونم از کجا شروع کنم الکترونیک هم تا حد زیادی پیچیده است. رشته تحصیلی من نرم افزار بوده بسیار کم با میکرو کنترلر و الکترونیک آشنایی دارم. من یه ایده خیلی خوب دارم که اگه بشه می تونه یه تحول ایجاد کنه. شما آموزش تخصصی هم میدید از راه دور؟
سلام و درود برشما ابوذر عزیز
حوزه رباتیک در حقیقت یک حوزه بین رشتهای هست و برای ساخت یک ربات علاوه بر دانش الکترونیک، اطلاعات مکانیکی و نرم افزاری هم نیاز داره بنابراین اگر قصد دارید کاری انجام بدید که منتهی به یک محصول تجاری بشه خیلی خوبه که در قالب یک تیم پیش برید. اما بهطور کلی در عصر فعلی منابع یادگیری در هر زمینهای فراوان هست از کتابهای دانشگاهی هر رشته گرفته تا دورههایی که در یوتیوب و سایر وبسایتها هست یا دورههای فنی حرفهای داخل کشور. برای مثال میتونید کتب مرجع دروس مدار ۱ و ۲، و سپس دروس الکترونیک ۱ و ۲ رو مطالعه کنید یا ویدیوهای تدریس دانشگاهی این دروس رو ببینید که اکثرا به رایگان هم قابل دسترسی هستند. مجموعه روبوایکیو در حال حاضر برنامه ای برای تدریس ندارد.
موفق باشید 🙂