
چرخ مهمترین المان حرکتی نسبت به سایر امکانات حرکتی چون باله، پا، … برای رباتهااست. چرخ حداقل سرعت، دقت و ثبات را که سه ویژگی خیلی مهم برای طراحی و ساخت ربات است فراهم میکند. محققان با الهام از پیرامون خود، انواع چرخها از جمله چرخهای استاندارد (ثابت)، چرخشی، توپی و همه جهته را طراحی کرده اند.
بسته به طراحی و الزامات ربات، چرخهای استاندارد در روشهای کلاسیک هدایت و فرماندهی استفاده میشوند، در حالیکه چرخهای چرخشی و توپی برای همان دسته و تعادل ربات استفاده میشوند. چرخهای همه جهته خیلی خوب هدایت و فرماندهی ربات را بر عهده می گیرند و این نوع چرخها برای رباتهایی بکار میروند که باید در همه جهات حرکت کنند.
در این مقاله مروری بر انواع چرخهای استاندارد، چرخشی، توپی و همه جهته خواهیم داشت.
چرخهای استاندارد یا ثابت
رایج ترین چرخهای موجود، چرخهای استاندارد هستند. این چرخ دارای دو درجه آزادی است. مرکز چرخ به شاسی ربات وصل شده است. زاویه بین شاسی ربات و صفحه چرخ ثابت است. چرخهای ثابت معمولا در رباتهای متحرکی بکار برده میشوند که چرخ به موتور وصل است و برای هدایت و فرماندهی ربات استفاده میشوند.

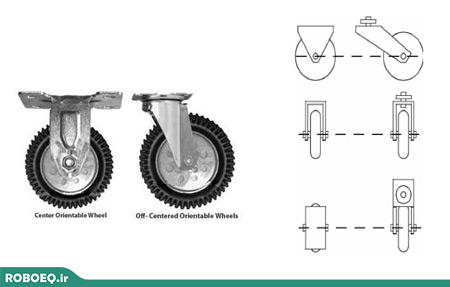
چرخ های جهت دار
این چرخها معمولا برای حفظ تعادل استفاده میشود و دو نوع هستند. چرخهایی که مرکز چرخ و محور متصل شده به ربات به صورت عمودی و یک راستا باشد که به آنها Centered گفته می شود. نصب آنها ساده و فقط با یک پیچ به پایه ربات وصل گردد.
نوع دیگر، چرخهایی است که مرکز چرخ و محور اتصال آن به ربات در یک راستا نباشد که به آنها Off- centeredیاcaster گفتهمیشود.همراستا نبودن محور باعث می شود گشتاور بیشتری به ربات وارد کند. در مدلهایی از این نوع چرخها، اتصال بین چرخ و قاب ربات چرخشی است و چرخ می تواند 360 درجه حول محور عمود بر چرخ بچرخد. یکی از بزرگترین عیبهای کاسترها لغزش آنهاست. این لغزش هنگامی اتفاق میافتد که چرخ با زمین تماس ندارد و به آسانی به هر جهتی می چرخد. به محض برخورد با زمین آنها می توانند در جهتی غیر همسو با جهت مدنظر قرار گرفته باشند.
چرخ های توپی
این چرخ از یک توپ و نگهدارنده ساخته شده است و درجه آزادی آن 360 درجه است. چرخهای توپی مانند چرخهای جهت دار بیشتر برای حفظ تعادل ربات استفاده می شوند. جنس توپ می تواند پلاستیکی یا فلزی باشد.
چرخهای هرزگرد که معمولا برای حفظ تعادل در جلو و عقب ربات قرار می گیرد را می توان در دسته قرار دهیم.

چرخ همه جهته
در این نوع چرخ، چرخهای کوچکی بر روی یک چرخ بزرگ به صورتی نصب میشود که محور چرخهای کوچک عمود بر محور چرخ بزرگ باشد. این چرخها یک سیستم چند جهته برای ربات میسازند و این امکان را برای ربات فراهم میکنند که به هر سمتی حرکت کند. از چرخ همه جهته برای حرکت و هدایت ربات استفاده می شود. یکی از مهمترین مزایای استفاده از چرخهای چند جهته اصطکاک پایین آن در هنگام حرکت است. به این چرخها سوئدی یا omni هم گفته میشود. در مدل Mecanum محور چرخهای کوچک زاویه 45 درجه با چرخ بزرگ دارد. چرخهای خورشیدی جز دسته چرخهای همه جهته هستند.






{kind=link}