
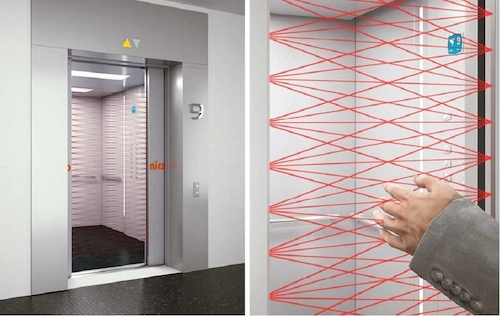
آیا تابهحال این سؤال برای شما پیشآمده که چرا وقتی گوشی موبایلتان را برای صحبت کردن نزدیک گوش خود میکنید نمایشگر آن ناگهان خاموش میشود؟ یا چرا رباتهای متحرکی که در مسابقات دیدهاید بدون برخورد با موانع از کنار آنها گذر میکنند؟ یا چرا با قرارگیری بین درب آسانسور درب بسته نمیشود؟ و هزاران سوال دیگر که فقط یک پاسخ دارند! بله درست است، در تمام سیستمهای هوشمند و رباتها از تکنولوژی تشخیص مانع مادون قرمز استفاده شده و این اصلاً فرایند پیچیدهای برای ما نیست، چراکه در این آموزش به طور مفصل راجع به نحوه عملکرد حسگرهای مادون قرمز صحبت خواهیم کرد و در پایان به آسانی یک ماژول سنسور تشخیص فاصله و مانع مادون قرمز را توسط آردوینو راه اندازی میکنیم، پس با ما همراه باشید و از این آموزش لذت ببرید:
ماژول سنسور تشخیص مانع مادون قرمز چیست؟
ماژول سنسور تشخیص فاصله و مانع IR قطعهای الکترونیکی است که از دسته حسگرهای غیرتماسی بهشمار رفته و براساس سنجش میزان و شدت نور مادون قرمز دریافتی از اشیاء پیرامون خود، موانع را تشخیص و فاصله میان مکان قرارگیری سنسور و یک شئ را با دقت اندازه گیری میکند. با مطالعه بخش بعدی با این دو وظیفه اصلی ماژول سنسور مادون قرمز بیشتر آشنا شوید:
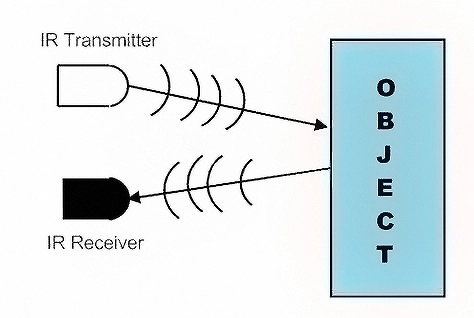
1) اندازهگیری مسافت با ماژول مادون قرمز:
کاربرد اشعه مادون قرمز در عملکرد یک ماژول فصله سنج IR، به این شکل است که، ابتدا فرستنده قراردادهشده روی این ماژول، نور مادون قرمز را ساطع کرده و این نور پس از برخورد به یک جسم، به سمت سنسور گیرنده روی برد IR، منعکس میشود. ماژول حسگر مادون قرمز هم بستهبه شدت نور بازتاب شده، میتواند فاصله جسم را تشخیص دهد. بهطوریکه هرچه جسم در نزدیکی سنسور قرار داشته باشد، سیگنال منعکس شده قویتر خواهد بود و هرچه جسم در فاصلهی دورتری نسبتبه سنسور قرار داشته باشد، سیگنال منعکس شده ضعیفتر خواهد بود.

2) تشخیص مانع با ماژول مادون قرمز :
جالب است بدانید یکی از نکات مهمی که در طراحی و ساخت یک ماشین یا ربات متحرک میبایست به آن توجه شود، استفاده از مداری جهت تشخیص موانعی است که در محیط اطراف ربات ما قرار دارند، زیرا این مدار اجازه میدهد تا قبل از آنکه پهباد یا ربات به جسمی برخورد کند به آن هشدار دهد که در نزدیکی یک مانع قرار دارد یا حتی به رباتهای مسیریاب کمک کند با تشخیص یک خط، در مسیر تعیینشده به حرکت خود ادامه دهند.
نمونههای مختلفی از سنسور های تشخیص مانع وجود دارد که یکی از آنها سنسور مجاورت مادون قرمز یا حسگرهای IR است. برای مثال، کاربرد دیگر آنها بهعنوان سنسور مجاورت مادون قرمز در پارکینگهای مدرن نیز مشاهده میشود، یعنی زمانی که در فضای پارکینگ خوردویی وجود نداشته باشد، چراغ سبز، روشن میشود و درصورتی که فضا اشغال شده باشد چراغ قرمز، روشن میشود. بنابراین سنسور مجاورت مادون قرمز توسط قابلیت تشخیص مانع خود، وجود خودرو را در فضای پارکینگ به ما اطلاع میدهد.
در ادامه این آموزش ما برای بررسی قابلیت سنسور مجاورت IR، با ماژول تشخیص مانع مادون قرمز HW-201 و نحوه راه اندازی آن آشنا میشویم.
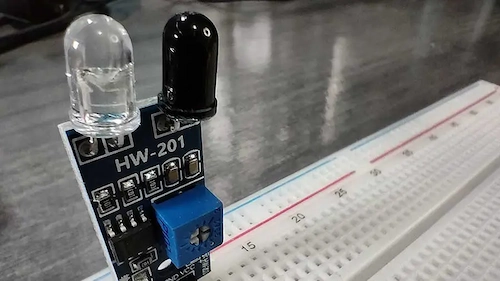
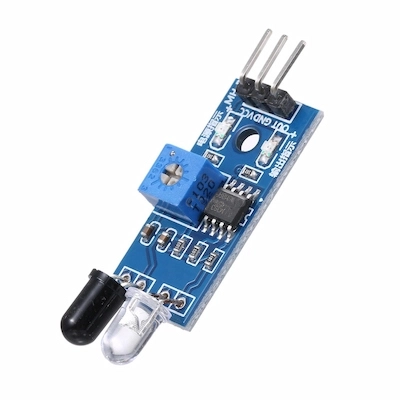
معرفی ماژول تشخیص مانع HW-201
ما در این پروژه از ماژول فرستنده و گیرنده مادون قرمز IR مدل HW-201 برای تشخیص یک مانع استفاده میکنیم. لازم است بدانید، این ماژول سنسور مادون قرمز از دو بخش اصلی تشکیل شده است: یک LED مادون قرمز (فرستنده) و یک فوتودیود مادون قرمز (گیرنده) و همانطور که دانستیم نحوه عملکرد حسگر به این صورت است که الایدی مادون قرمز، اشعه مادون قرمز را ساطع کرده و فوتودیود نور منعکس شده را به جریان الکتریکی تبدیل میکند تا سنسور بتواند شدت نور منعکس شده را تفسیر و پردازش کند و از این طریق وجود یک مانع را از فاصله 2 تا 30 سانتیمتری تشخیص و فاصله خود تا آن شئ را اندازهگیری کند.
- سنسور تشخیص مانع HW-201 دارای سه پین است، بهطوری که پینهای VCC و GND به ترتیب به پین 5 ولت و پین GND آردوینو متصل میشوند و پین OUT به هر پایه دیجیتال آردوینو به جز پین های شماره 0 و 1 متصل می شود.
توجه : ولتاژ تغذیه موردنیاز برای ماژول تشخیص مانع مادون قرمز، 5 ولت DC میباشد.
- این ماژول تنها یک خروجی دیجیتال HIGH یا LOW و به عبارت دیگر 0 یا 1 دارد که در صورت تشخیص مانع، خروجی HIGH میشود و درغیر اینصورت خروجی LOW خواهد شد.
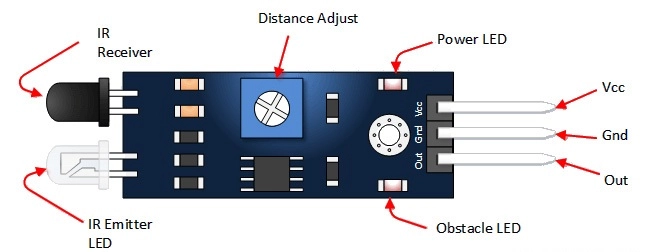
همچنین روی این ماژول یک پتانسیومتر بهمنظور تنظیم فاصله جسم، قبل از فعال شدن سنسور وجود دارد که با استفاده از یک پیچگوشتی میتوانید آن را در جهت عقربههای ساعت یا خلاف آن بچرخانید و با این کار حساسیت سنسور را تنظیم نمایید. درواقع هنگام تشخیص مانع و دریافت پرتو بازتابشده از سطح مانع توسط گیرنده، سیگنال دریافتی با آستانه تنظیمشده توسط پتانسیومتر مقایسه میشود و خروجی ماژول Low خواهد شد.
نحوه اتصال و راه اندازی ماژول سنسور HW-201 توسط آردوینو
در این آموزش، سنسور مجاورت مادون قرمز HW-201 را به یک آردوینو UNO متصل میکنیم. یک LED را نیز به آردوینو متصل میکنیم تا در صورت تشخیص مانع، LED روشن و در غیر اینصورت خاموش شود. نحوه اتصال سنسور مادون قرمز و الایدی به آردوینو را میتوانید در تصویر زیر مشاهده کنید و انجام دهید.
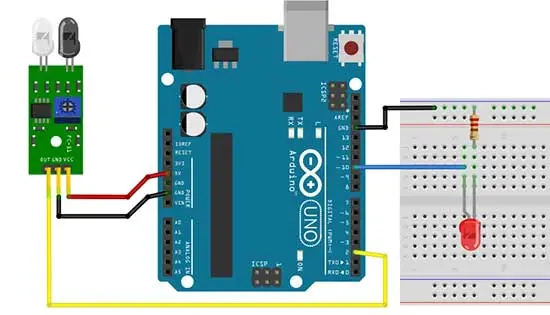
در اینجا پایه خروجی سنسور به پین شماره 2 آردوینو و پایه آند LED به پین دیجیتال شماره 10 آردوینو متصل شده است.
کد آردوینو
پس از ایجاد اتصالات گفته شده نوبت به آپلود تکهکد آردوینو در IDE سیستم میرسد . (البته همانطور که میدانید پیش از آپلود کد لازم است ماژول آردوینو را توسط کابل پرینتری به کامپیوتر متصل و Arduino IDE اختصاصی سیستمعامل خود را دانلود و نصب کنید.)
//Switch an LED using an IR sensor
int ir = 2;
int PinLed = 10;
int val=0;
void setup()
{
pinMode(ir, INPUT);
pinMode(PinLed, OUTPUT);
}
void loop()
{
if(digitalRead(ir) == LOW)
{
digitalWrite(PinLed, HIGH);
}
else
{
digitalWrite(PinLed, LOW);
}
}
توضیحات کد
ما در برنامه این پروژه، برای پین دیجیتال شماره 2 آردوینو یعنی جایی که خروجی سنسور تشخیص مانع متصل شده است، متغیری به نام “ir” تعریف کردهایم. همچنین برای پین دیجیتال شماره 10 یعنی جایی که LED متصل شده است متغیری تحت عنوان ” PinLed” ایجاد نمودهایم.
int ir = 2;
int PinLed = 10;
- در تابع ()setup، متغیر “ir” را بهعنوان ورودی و متغیر ” PinLed” را بهعنوان خروجی تنظیم میکنیم.
pinMode(ir, INPUT);
pinMode(PinLed, OUTPUT);
در تابع ()loop وجود مانع بررسی میشود و این امر توسط یک if-else ساده انجام میشود. تابع ()digitalRead بهعنوان شرط دستور if قرار میگیرد. این یک روش کوتاه به جای نوشتن یک دستور digitalRead جداگانه قبل از دستور if است. (یادآوری: نماد “==” دو عبارت را مقایسه میکند که آیا با یکدیگر برابر هستند یا خیر؛ درحالیکه نماد “=” یک مقدار به متغیر اختصاص میدهد.)
چنانچه پاسخ شرط درست باشد، با اجرا شدن کد زیر دستور if، الایدی روشن میشود که بیانگر تشخیص مانع است. چنانچه پاسخ شرط نادرست باشد، کد زیر دستور else اجرا میشود که در این حالت LED خاموش میشود که بیانگر عدم وجود مانع است.
عوامل ایجاد خطا در تشخیص اشیاء:
درکنار فواید و مزایای سنسور تشخیص مانع مادون قرمز، نقاط ضعفی نیز دارند. از جمله مواردی که میتواند بر روند تشخیص آنها تأثیر بگذارند، عبارتند از:
- منابع نور خارجی دیگری وجود داشته باشد.
- جسم موردنظر به رنگ تیره باشد. (هر چه رنگ جسم تیرهتر باشد، نور کمتری را بازتاب میکند و این باعث شده تا دیرتر تشخیص داده شود.)
بنابر نکاتی که وجود دارند میبایست سعی داشت این موانع را در محیط اطراف سنسور، از بین برد تا نتییجه دقیقتری را بهدست آوریم.
امیدواریم با شناخت کامل ماژول سنسور تشخیص مانع IR و انجام این پروژه ساده ، یکی دیگر از کاربردهای حسگرهای مادون قرمز در حوزه رباتیک را شناخته و در انواع پروژههای نیاز به قابلیت تشخیص اشیاء، از این سنسور پرطرفدار استفاده کنید. همچنین میتوانید در بخش دیدگاه همین صفحه، سؤالات و نظرات مرتبط با این مبحث را برای تیم کارشناس مجموعه روبوایکیو ارسال و پاسخ خود را در اسرع وقت دریافت نمایید.




 با آردوینو){kind=link}
۲ دیدگاه. Leave new
عالي بود
درود برشما دوست عزیز
خوشحالیم که در این آکادمی حضور داری و از آموزش های جذاب ما استفاده می کنی 🙂