
با الهام گیری از پرواز حشرات، ربات حشره نمایی ساخته شده است که از بالهای خود برای بلند شدن از زمین استفاده می کند. انرژی این ربات برای نخستین بار از تابش پرتو لیزر به photovoltaicتامین می شود.
رباتهای کوچک پرنده می توانند در وظایف وقت گیر همچون نظارت بر رشد محصول در مزارع بزرگ و تشخیص نشت گاز به ما کمک کنند. این رباتها با بالهای نازک خود اوج می گیرند چرا که خیلی کوچک تر از آن هستند که بتوان مشابه نمونه های بزرگترشان از ملخ برای اوج گیریشان استفاده کرد. اندازه کوچک ربات حشره نما یک مزیت است. ساخت این رباتها ارزان است و می توانند به سادگی به موقعیتهای سخت غیر قابل دسترس پرواز کنند.
تامین نیروی ربات حشره نما
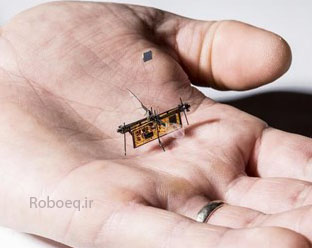
قرار دادن منبع تامین برق و کنترل بالها بر روی این رباتهای مینیاتوری، برای آنها سنگین است. به همین دلیل تاکنون این رباتهای حشره نما از زمین کنترل می شدند. مهندسان دانشگاه واشنگتن ربات حشره نما، RoboFly، را معرفی کردند که برای اولین بار ارتباط ربات با زمین قطع شده است و با اضافه شدن یک مغز، ربات بطور مستقل پرواز می کند. این پرواز کوتاه است اما یک جهش بزرگ برای این گونه رباتهاست. ربات در کنفرانس آتی رباتیک و اتوماسیون رونمائی می شود.
RoboFlayکمی از خلال دندان سنگین تر است و نیروی خود را از اشعه لیزر می گیرد. مدار کوچکی انرژی لیزر را به برق تبدیل می کند تا بالها را به حرکت در آورد. مشکل مهندسین بال زدن است که فرایندی انرژی بر است و منبع نیرو و کنترلر بالها بزرگتر از آن هستند که بر روی ربات قرار گیرند. ربات قبلی حشره نما، RoboBee، رشته ای داشت که از زمین انرژی دریافت می کرد و بالها را کنترل می نمود. اما ربات باید بتواند مستقل عمل کند. Fuller و تیمش تصمیم گرفتند از یک پرتو باریک نامرئی لیزر برای تامین نیروی ربات استفاده کنند. آنها پرتو لیزر را به یک سلولphotovoltaic که در بالای RoboFlyقرار دارد، متمرکز کردند تا نور لیزر به برق تبدیل شود.
با این حال لیزر به تنهایی ولتاژ لازم برای حرکت بالها را تامین نمی کرد. به همین جهت طراحان تصمیم گرفتند ولتاژ 7 ولت دریافتی از photovoltaic را به 240 ولت برسانند. مهندسان برای کنترل حرکت بالها یک میکرو کنترلر به مدار اضافه کردند. این میکرو کنترلر مشابه مغز عمل می کند.

Vikram Iyer یکی از دانشجوی دکتری برق اعلام کرد هنگام قرار گرفتن ربات در موقعیتی مثل آتش سوزی، این میکروکنترلر مثل مغز به بالها فرمان می دهد. Johannes Jamesدانشجوی دکتری مکانیک اظهار داشت، این ربات از پالسها برای بال زدن و شکل دهی موج استفاده می کند. با ارسال سریع پالسها به صورت سری متناوب و سپس کاهش آن در نزدیکی اوج، همان وظیفه فلپ[1] انجام می شود. سپس این کار در جهت معکوس برای ایجاد فلپ در جهت دیگر انجام می شود. این ارسال پالس و حرکت بالهای ربات حشره نما با الگوگیری از حرکت بالهای حشره واقعی صورت گرفته است.
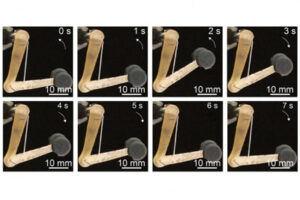
در حال حاضر RoboFly می تواند از زمین بلند شود و بنشیند. هنگامی که سلول photovoltaicاز معرض پرتو لیزر خارج شود ربات نیروی خود را از دست داده و به زمین می نشیند. طراحان ربات حشره نما امیدوار هستند به زودی لیزر را طوری هدایت کنند که RoboFlyبتواند پرواز کند و معلق بماند.
Gollakota بیان داشت، ربات فعلی از لیزر ساخته شده اما نسخه های بعدی می تواند از باتری های نازک یا از انرژی سیگنالهای فرکانسی رادیو استفاده کند. به این ترتیب منبع نیرو می تواند برای وظایف خاص تغییر کند. Fuller اعلام کرد، می توان بر روی مغزهای پیشرفته تر و حسگرهای RoboFlyتحقیقاتی بیشتر انجام داد تا ناوبری ربات بهبود یابد و وظایف ربات تکمیل گردد.
Fuller همچنین اظهار داشت ” واقعا دوست دارم بتوان نشت گاز متان را پیدا کرد، شما می توانید یک چمدان پر، از این رباتها بخرید و در اطراف خانه تان در جستجوی نشتی لوله های گاز پرواز دهید . این رباتها می توانند انتشار گاز گلخانه ای را کاهش دهند.همانطور که حشرات واقعی که به خوبی پرواز می کنند و در جستجوی چیزهای کوچک هستند.”
[1] فلپ بخشی است که هنگام اوج گیری هواپیما در قسمت بال باز می شود تا بال یزرگترشود و سرعت هواپیما بیشتر شود تا بتواند از زمین بلند شود.




{kind=link}