
مینی چیتا ربات جدیدMIT سبک و نرم بر روی پاهایش میجهد و پشتک میزند. مینی چیتا میتواند پاهایش را خم کند و نوسان دهد، میتواند هنگام راه رفتن یکی از پاها را به طرف راست حرکت دهد یا آن را بالا پایین کند. این ربات همچنین میتواند در زمینهای ناهموار سریعتر از افراد معمولی حرکت کند.
وزن این ربات حدود 9 کیلو است. هنگامیکه به زمین می خورد می تواند خیلی سریع بچرخد و به حالت اول برگردد.
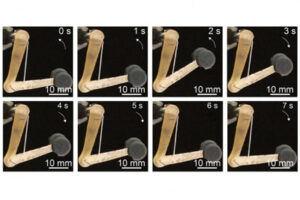
شاید بتوان گفت مهمترین توانایی این ربات توانایی پشتک 360 درجه در جای خود است. محققان این پروژه ادعا میکنند که مینی چیتا به صورتی طراحی شده که تقریبا غیر قابل خراب شدن است و در آسیبهای کم و حتی در پایان پشتک زدن که پخش زمین شود، میتوان آن را بازیابی کرد.
هر پای ربات با سه موتور الکتریکی یکسان و ارزان حرکت می کند. هر موتور در صورت آسیب دیدگی میتواند به سادگی با قطعه ای جدید تعویض گردد. چرا که ربات با قطعاتی طراحی شده که به صورت انبوه ساخته شده و دسترس هستند. در واقع میتوان گفت این قطعات مشابه لوگو در کنار هم قرار گرفته اند.
دلیل ساخت این ربات به صورت لوگو مانند آسان کردن آزمایشهاست. ربات خیلی محکم است و به سادگی نمیشکند و اگر شکست به سادگی و با قیمتی ارزان تعمیر میشود.
محققان این پروژه امیدوار هستند بتوانند سرعت عبور این ربات سگ را از بین موانع افزایش دهند. هر تیم میتواند یک مینی چیتا را با الگوریتم های مختلف هدایت کند تا در آخر مشاهده شود کدام استراتژی موثرتر واقع شده است.
ویژگیهای مینی چیتا نسبت به ورژن قبلی
مینی چیتا علاوه بر این اینکه ورژن مینیاتوری چیتا 3 است، دارای ویژگیهای دیگری نیز هست. چیتا 3 ربات بزرگ سنگین و شگفت انگیزی است که نیاز دارد از قطعات گرانقیمت و سفارشی ساخته شده آن محافظت شود.

چیتای 3، به صورت یکپارچه ساخته شده است. اگر بخواهید بخشی را تغییر دهید مجبور هستید ربات را باز طراحی کنید. در حالیکه در مینی چیتا اگر بخواهید یک بازوی دیگر اضافه کنید، فقط باید سه یا چهار موتور ماژولار اضافه کنید.
در طراحی موتور الکترونیکی از موتورهای تجاری رایج که معمولا در هواپیماهای بدون سرنشین و کنترل از راه دور بکار میروند، استفاده شده است.
12 موتور ربات شامل یک استاتور یا مجموعه ای از کویلهایی است که میدان مغناطیسی چرخشی تولید میکنند؛ یک کنترلر کوچک که مقدار جریان استاتوری که باید تولید شود را هدایت میکند؛ یک روتور که با آهنربا میدان استاتور را میچرخاند و گشتاور حرکت و چرخش اندام را تولید میکند؛ یک گیربکس با چرخ دهنده کاهشی 6 به 1 که قادر است گشتاور ربات را به شش برابر حالت معمول آن برساند و سنسورهای موقعیت که زاویه و جهت موتور و عضو مربوطه را اندازه گیری میکند.
برای سه درجه آزادی و رنج وسیعی از حرکت هر پا از سه موتور استفاده میشود. طراحی این ربات با وزن کم، گشتاور بالا و اینرسی پایین باعث شده ربات بتواند مانورهای سریع و دینامیکی انجام دهد و هنگام ضربه زمین خوردن شکستگی عضو یا گیربکس نداشته باشد. این ربات میتواند کارهای واقعا پویا مثل پریدن در هوا با هر قدم یا راه رفتن با دو پا بر روی زمین انجام دهد. بیشتر رباتها قابلیت انجام این حرکات را ندارند و خیلی آهسته تر حرکت میکنند.
مهندسان این طرح، مینی چیتا را در دو مکان تست کردند. در راهروهای MITو در زمین ناهموار. در هر دو محیط با 5 مایل در ساعت حرکت کرد. مفاصل ربات توانایی چرخش سه برابری با اعمال دو برابر گشتاور را داشتند. تخمین زده میشود ربات بتواند با کمی تغییر دو برابر سریعتر شود.
تیم تحقیق، کد کامپیوتر دیگری برای کشش و چرخش اندام و مفاصل و حفظ تعادل نوشت. آنها همچنین ربات را برای بازیابی در هنگام اعمال نیروی ناگهانی به ربات مثل برخورد به اطراف برنامه ریزی کردند. هنگامیکه محققان به ربات در زمین ضربه وارد میکنند، اتوماتیک خاموش میشود.
ربات در اولین مرحله آزمایش به صورت شگفت انگیزی عمل کرد. فوق العاده هیجان انگیز بود. تصور کنید چیتای 3 پشتک می زد و از کار میافتاد. این حرکات با مینی چیتا امکان پذیر است. هم اکنون بر روی کنترل کردن فرود ربات کار میشود، ایده اولیه این است که ربات بتواند بعد از چرخیدن و پرتاب شدن فقط بر روی پاهایش در زمین فرود بیاید.




{kind=link}