قسمت های مدار
- قسمت تغذیه
- فرستنده
- گیرنده
- جبر بولی در واقع در این قسمت کار نتیجه گیری حرکت انجام می شود
- کنترل موتور
قسمت فرستنده
قطعات مورد نیاز قسمت فرستنده
- 1عدد آی سی PT2262IR
- 4عدد مقاومت 4.7 کیلو اهم
- 1 عدد مقاومت 470 کیلو اهم
- 1 عدد خازن 100 میکروفاراد
- 4 عدد دیود 1N4148
- 1 عدد مقاومت 7.8 اهم
- 1 عدد مقاومت 100 اهم
- 2 عدد ترانزیستور 2SC557
- 1 عدد فرستنده مادون قرمز
- 4 عدد کلید push-bottom
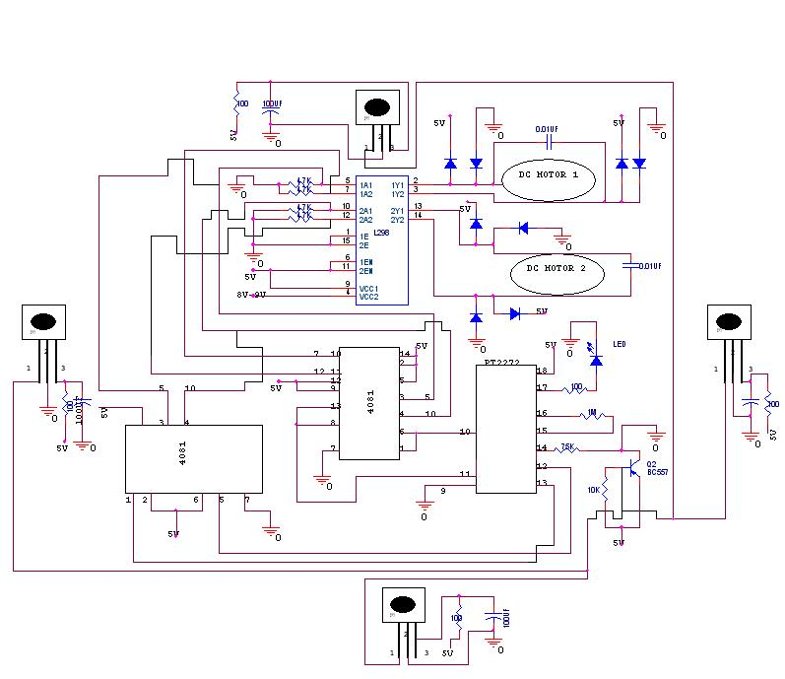
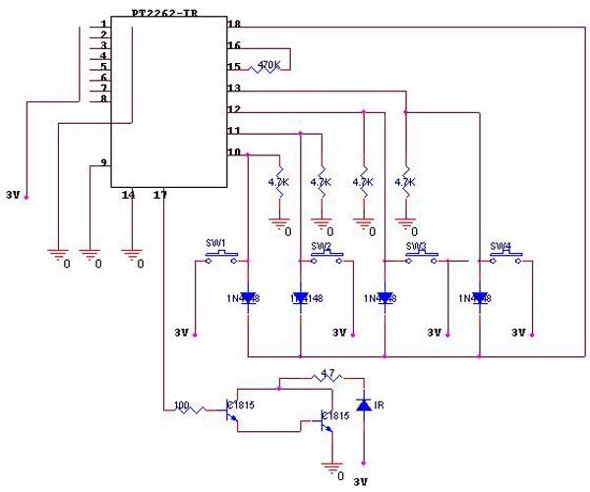
نقشه مدار به همرا توضیحات مدار
اگر می خواهید از تغذیه ای بیشتر از 3 ولت استفاده کنید.مثلا 5 تا 6 ولت بایست به جای مقاومت 4.7 اهم که به سر کاتد دیود فرستنده متصل شده است.(سمت کاتد دیود دارای یک حلقه مشکی رنگ است و سمت آند این حلقه را ندارد.)
مقاومت 220 تا 470 اهم را امتحان کنید.در ضمن نحوه اتصالات در نقشه کاملا مشخص است و نیازی به توضیح ندارد.نکته ای که می مانند.نحوه ارسال اطلاعات است.زمانیکه شما هر یک از کلیدها را فشار می دهید همانطور که در نقشه مشخص است.پایه 18 که مربوط به تغذیه مثبت است حاوی ولتاژ نزدیک به 3 ولت می شود. علت افت ولتاژ در این پایه به دلیل وجود دیودها است چرا که دیود ها بسته به نوع آن ها باعث اندکی افت ولتاژ در مدار می شوند.
در ضمن در قسمت فرستنده، آند دیود فرستنده مادون قرمز مطابق نقشه به مثبت ولتاژ متصل است.که برای کار، می بایست قسمت زمین آن نیز وصل شود.،قسمت زمین این فرستنده مادون قرمز توسط پایه 17 آی سی ایجاد می شود.هر کدام از کلیدها را که فشار دهید.این پایه ولتاژ دار یا به اصطلاح HIGH می شود.با HIGH شدن این پایه بیس ترانزیستور C1815 توسط این پایه و مقاومت 100 اهم تحریک می شود. و با توجه به نوع آن که NPN است.وبعد از آن نیز یک ترانزیستور C1815 دیگر قرار گرفته است.( به این نوع ترکیب ترانزیستورها به اصطلاح دارلینگتون می گویند.) دراین نوع ترکیب ترانزیستورها با کوچکترین جریانی در بیس ترانزیستور روشن می شود.اگر به نقشه توجه کنید.در کنار پایه های 1 تا 9 هم ولتاژ مثبت را ملاحظه می کنید.و هم تغذیه زمین که در اینجا همان ولتاژ صفر است.
این ولتاژهای جهت کد بندی اطلاعاتی است که شما ارسال می کنید. نظیر همین پایه هایی که به مثبت یا زمین وصل می کنید در گیرنده نیز پایه های متشابه با پایه های فرستنده را نیز به زمین یا مثبت ولتاژ متصل کنید.
در این پروژه من از پیش فرض آی سی PT2262IR استفاده کردم و این پایه های آدرس دهی را به جایی وصل نکردم.اگر می خواهید این پایه ها را آدرس دهی کنید همین کار را بایست در گیرنده نیز تکرار کنید.اگر اسیلسکوپ در اختیار داشته باشید.با اتصال یک سر پراپ اسکوب به زمین مدار و اتصال سر دیگر کابل به سر کاتد دیود مادون قرمز فرستنده می توانید شکل موج هایی که ارسال می شود را ملاحظه کنید با فشار هر دکمه PUSH-BOTTOM شکل موج های متفاوتی را و کاملا کد شده و متمایز را در سمت کاتد دیود فرستنده خواهید دید.
این شکل موجها به صورت چند پالس مربعی HIGH و چند پالس صفر است.که این پالس ها در صورت فشار هر یک از کلید های PUSH-BOTTOM به صورت دایم در اسکوپ نیز به صورت مکرر دیده می شوند.تعداد پالس های مثبت و صفر که توسط قشردن هر کلید ایجاد می شود کاملا از یکدیگر متمایز هستند.و همین نکته است که در گیرنده اشتباهی رخ نمی دهد و با فشردن هر کلید .پایه متناسب ّبا آن در گیرنده HIGH یا LOW می شود.
قسمت گیرنده
قطعات مورد نیاز قسمت گیرنده
- 1 عدد آی سی PT2272-M
- 4 عدد سنسور مادون قرمز 3 پایه PIC-2319SMB(البته به جای این سنسور از سنسورهای 3 پایه دیگر هم می توانید استفاده کنید.ولی این سنسور عملکر مطلوبی دارد.)
- 1 عدد مقاومت 1 مگااهم
- 1 عدد مقاومت 100 اهم
- 1 عدد مقاومت 75 کیلو اهم
- 1 عدد ترانزیستور C1815
- 2 عدد مقاومت 10 کیلو اهم
- 4 عدد مقاومت 100 اهم
- 5 عدد خازن 100 میکروفاراد
- 1 عدد LED
نقشه مدار به همراه توضیحات مدار
در نقشه مدار تمام جزییات مشخص است.به سنسور گیرنده مادون قرمز توجه کنید در بالای یکی از پایه ها حرفی شبیه به E انگلیسی را مشاهده می کنید.این پایه،پایه خروجی این سنسور است.پایه وسطی این سنسور پایه زمین است.و پایه دیگر مربوط به تغذیه مثبت این سنسور است.همانطور که در نقشه مشاهده می کنید. پایه تغذیه سنسور مادون قرمز در هر چهار سنسور یک بار با یک مقاومت 100 اهم به مثبت منبع تغذیه و بار دیگر با یک خازن 100 میکرو فاراد به زمین می رود.این نوع خازن ها الکترولیت هستند.
که می بایست به جهت آن توجه کنید.سر منفی این خازن را که بر روی آن با علامت منفی مشخص است.به زمین وسر دیگر آن را به پایه 3 این 4 سنسور به صورت مجزا همانطور که در نقشه مشخص است متصل کنید.
در این نقشه چهار سنسور مادون قرمز را می بینید که با هم موازی شده اند.پایه خروجی همه این سنسورها با یک مقاومت 10 کیلو اهم به بیس ترانزیستور 557 متصل است.البته در ابتدا برای هر سنسور یک ترانزیستور مجزا در نظر گرفتم و مدارش را بستم،سپس یک ترانزیستور برای همه سنسورها را امتحان کردم دیدم از لحاظ عملکرد و میزان فاصله تفاوتی نمی کنند.پس یک ترانزیستور را برای همه مدار انتخاب کردم.
ترانزیستور 557 یک ترانزیستور PNP یا به اصطلاح مثبت است.که بیس آن با ولتاژ صفر تحریک می شود.،و در واقع ترانزیستور روشن می شود.همانطور که در نقشه ملاحظه می کنید بیس این ترانزستور با یک مقاومت 10 کیلواهم به مثبت ولتاژ متصل شده است.
در واقع در حالت عادی،یعنی زمانیکه پالسی توسط سنسورها دریافت نمی شود.این ترانزیستور به خاطر مقاومت 10 کیلواهمی که به بیس آن متصل است خاموش است.در لحضه روشن شدن،ترانزیستور پالس دریافت شده از سنسور گیرنده را به پایه 14 انتقال می دهد.و این پایه تشخیص می دهد.،که کدامیک از پایه های 10 تا 13 HIGH یا به عبارتی دارای ولتاژ مثبت باید بشود.
که نحوه ارسال این پالس ها در قسمت فرستنده توضیح داده شده است.هر بار که شما کلیدی را در قسمت فرستنده فشار دهید.اگر به هر یک از پایه های 10 تا 13 آی سی PT2272 یک عدد LED را با مقاومت 100 اهم متصل کنید.می بینید زمانیکه کلید مربوط به پایه 10 در فرستنده را فشار می دهید.پایه متناظر آن در گیرنده که پایه 10 است HIGH یا ولتاژ دار می شود که این HIGH شدن در صورت اتصال LED به این پایه،باعث روشن شدن آن می شود.همین قضیه در مورد دیگر پایه ها نیز حاکم است.
اگر در قسمت فرستنده پایه از پایه های 1 تا 8 آیسی را به زمین یا مثبت ولتاژ متصل کرده اید.بایست متناظر آن در گیرنده را به زمین یا ولتاژ متصل کنید تا مدار شما درست کار کند.که من همانطور که در قسمت فرستنده عنوان کردم از این کار استفاده نکردم و از پیش فرض خود آیسی فرستنده استفاده کردم.بنابراین این کار را در قسمت گیرنده نیز انجام ندادم.
در ضمن شما هر بار که کلیدی را در قسمت فرستنده فشار دهید.LED ای که با یک مقاومت 100 اهم به پایه 17 متصل شده است روشن می شود و این روشن شدن تا زمینیکه دست شما بر روی هر یک از کلیدها در فرستنده باشد ادامه می یابد.به محض قطع کردن کلید این LED نیز خاموش می شود.در واقع این کلید به صورت وقفه یا INTERRUPT عمل می کند.گذاشتن این LED در مدار برای این است که سازنده بفهمد چه موقع عمل دریافت صورت می گیرد.
نکته آخری که می ماند این است که آی سی PT2272-M ، آی سی ای از نوع لحظه ای است.یعنی به محض قطع شدن کلید در فرستنده پایه متناظر آن کلید در گیرنده نیز قطع می شود.ممکن است در بعضی مواقع بخواهید این اطلاعات یا کنترل شما در صورت قطع شدن هر یک از کلید های فرستنده نیز باقی بماند برای این منظور به جای آی سی PT2272-M از آی سی PT2272-L استفاده کنید.قسمت گیرنده نیز در اینجا تمام می شود.اگر می خواهید می توانید کار را تا همان جا دنبال کنید و به جای استفاده از گیرنده برای کنترل موتورهای ربات برای کنترل موارد دیگری استفاده کنید.

قسمت مربوط به استفاده از گیت های منطقی
قطعات مورد نیاز
2 عدد آیسی 4081
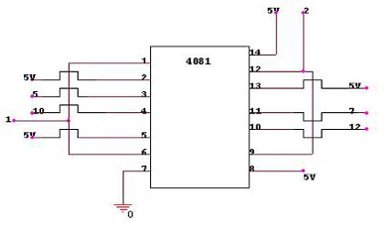
نقشه مدار به همرا توضیحات
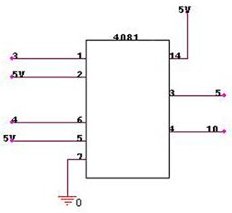
قبل از توضیحات این قسمت لازم است بگویم که آی سی 4081 دارای 4 عدد گیت AND است.هر گیت شامل دو ورودی و یک خروجی است.بنابراین در این آی سی ما دارای 8 ورودی و 4 خروجی مجزا هستیم. که مجموع این پایه ها 12 عدد می شود 2 پایه دیگر این آی سی نیز به تغذیه زمین و مثبت اختصاص دارند.این نکته را نیز بدانید که خروجی هر گیت AND زمانی HIGH یا یک یا فعال می شود.،که هر دو ورودی آن HIGH یا یک یا فعال باشند.پس هر کجا من از عبارات HIGH یا فعال شدن یا یک شدن استفاده کردم همه یک معنی را می دهند.
در این نقشه پایه 1 و 6 آی سی 4081 به صورت مشترک به پایه 13 آی سی PT2272-M که در نقشه مربوط به قسمت گیت منطقی در کنار آن عدد 1 گذاشته شده است.متصل می شود.پایه های 2و5 را نیز به صورت مستقیم به مثبت ولتاژ متصل کنید.هر زمان که پایه 13 آیسی PT2272 به واسطه فرستنده HIGH شود.پایه های خروجی 3و4 این آی سی HIGH می شود که این پایه جهت کنترل موتور به پایه های ورودی 5 و 10 یا INPUT آی سی L298 متصل می شود.در این حالت هر دو موتور در یک سمت حرکت می کنند که این حرکت باعث حرکت ربات به سمت جلو می شود.همین مسئله نیز در مورد پایه های خروجی دیگر آی سی 4081 نیز وجود دارد.که با فعال شدن پایه 12 آی سی PT2272 هر دو خروجی 10,11 آی سی 4081 نیز فعال می شوند.پایه 11 آی سی 4081 را به پایه 7 و پایه 10 آی سی 4081 را به پایه 12 آی سی L298 متصل کنید.در این حالت دو موتور بر خلاف حالت قبل می چرخند و ربات شما به سمت عقب حرکت می کند.در شکل سمت راست نیز نحوه چرخش ربات به سمت راست یا چپ را با روشن شدن تنها یک موتور مشاهده می کنیدزمانیکه پایه 11 از آی سی PT2272 که در کنار آن عدد 3 نیز نوشته شده است فعال شود.پایه 1 دومین آی سی 4081 ، HIGH می شود با توجه به HIGH شدن این پایه و اینکه پایه 2 این آیسی به طور مستقیم به مثبت ولتاژ متصل است.،پایه 3 دومین آی سی 4081 نیز ،HIGH می شود.با توجه به اتصال این پایه به پایه 5 آی سی L298 تنها موتور سمت راست روشن می شود و موتور دیگر همچنان خاموش است .این مسئله تا زمانی وجود دارد.که شما کلید مربوط به این عملکرد را در فرستنده فشار دهید.به محض قطع شدن این کلید.هر دو موتور خاموش می شوند.در مورد پایه 4 نیز همین قضیه برای موتور دیگر صادق است.که براحتی می توانید این قضیه را تحلیل کنید.
نحوه کنترل موتور
قطعات مورد نیاز
- 1 عدد آیسی L298
- 4 عدد مقاومت 4.7 کیلو اهم
- 8 عدد دیود 1N4007
- 2 عدد خازن 104
- 2 عدد خازن 10 میکروفاراد
نقشه مدار به همراه توضیحات
در این قسمت می بایست پایه های خروجی را به پایه های ورودی آی سی L298 که در این قسمت نقشه، هم پایه های ورودی آی سی L298 و هم پایه های خروجی آی سی 4081 به این پایه ها مشخص شده است.،متصل کنید.
پایه های ورودی آی سی L298 به صورت مجزا با 4 عدد مقاومت 4.7 کیلواهم به زمین متصل شده است تا تکلیف این ورودی ها در زمانیکه پالسی فرستاده نمی شود مشخص باشد.
در حالتی که هر 4 ورودی با این مقاومت ها زمین شده باشد هر دو موتور خاموش است.پایه های های مربوط به ENABLE یا فعال شدن این آی سی در نقشه مشخص است.پایه های 6و 11 به مثبت ولتاژ و پایه های 1و 15 را به زمین برای کار با این آی سی می بایست متصل شود.پایه 4 تغذیه دیگر این آی سی که تا ولتاژ 42 ولت را تحمل می کند هر چه قدر این ولتاژ بیشتر باشد.موتور های شما قدرت بیشتری دارند.البته موتورهای شما نیز بایست تحمل این حد از ولتاژ را داشته باشند.در اینجا من برای این پایه ولتاژ 8 ولت را در نظر گرفتم.اگر بدنه ربات شما سبک است می توانید برای این پایه نیز ولتاژ 5 ولت را در نظر بگیرید.
پایه های 2،3،14 و 13 از آی سی L298 پایه های خروجی هستند.پایه 2 و 3 برای یک موتور و پایه های 13 و 14 برای موتور دیگر استفاده می شود.سر هر سیمی که به هر موتور وارد می شود با دو عدد دیود به زمین و مثبت ولتاژ متصل می شود.بنابراین 8 دیود برای حفاظت مدار از جریان برگشتی موتور احتیاج داریم.همانطور که می بینید سر آند یا سر مثبت این دیودها به زمین و سر منفی یا کاتد به مثبت ولتاژ متصل می شود.مطلبی دیگر نمی ماند جز اینکه چرا از خازن در دو سر موتور استفاده شده است.بایست بگویم موتور یک مصرف کننده سلفی است.که در آن جریان از ولتاژجلوتر است برای از بین بردن این مسئله و برای اینکه موتور بتواند حرکت کند از یک خازن در دو سر هر دو موتور استفاده می شود.اگر خازن های 104 برای شما مطلوب نبود می توانید دو عدد خازن 10 میکروفاراد را با این دو خازن نیز موازی کنید.در اینجا با توجه به مهم بودن جهت خازن های الکترولیت تفاوتی نمی کند که خازن را در چه جهتی به دو سر موتور متصل می کنید.

قسمت تغذیه ربات
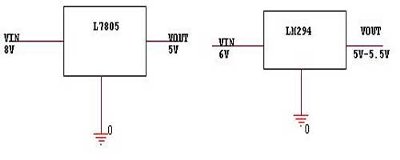
در این ربات از 6 عدد باطری 1.2 ولت 2300 میلی آمپر قابل شارژ سونیNMH استفاده کردم.اگر این باطری ها را شارژ کنید مجموع آن ها تا 8.5 ولت نیز می شود.اگر از این باطری ها استفاده می کنید.بایست از رگولاتور 7805 استفاده کنید.و تنها تغذیه پایه 4 آی سی L298 را به صورت مستقیم به ولتاژ 8 ولت متصل کنید .بقیه مدار ولتاژ 5 ولت را خواهند داشت که از خروجی رگولاتور 7805 ،این ولتاژ را دریافت خواهند کرد.در رگولاتور 7805 برای داشتن ولتاژ 5 ولت در خروجی بایست ولتاژ وردی حدود 2.5 ولت از ولتاژ خروجی بیشتر باشد.
اگر از 4 عدد باطری 1.5 ولت معمولی استفاده می کنید.مجموع ولتاژ ها 6 ولت می شود.که در اینجا دیگر رگولاتور 7805 عملکرد مطلوب یعنی ولتاژ 5 ولت ثابت را در خروجی نخواهد داشت.برای این منظور از رگولاتور LM294 استفاده بایست کرد.این رگولاتور با اختلاف 0.5 ولت از ولتاژ ورودی،ولتاژ خروجی را ایجاد می کند.به شکل نقشه این قسمت در زیر توجه کنید. البته استفاده از باطری های معمولی را زمانی پیشنهاد می کنم که ربات شما مکانیک سبکی داشته باشد.
نقشه کلی مدار