با وجود پیشرفتهای قابل توجه تکنولوژی در سالهای اخیر، هنوز چالشهایی برای بدست آوردن مستنداتی از زندگی زیر آب وجود دارد. محققان کامپیوتر MIT این مشکل را با استفاده از رباتها حل کرده اند. اخیرا یک تیم از گروه علوم کامپیوتر و هوش مصنوعی MIT(CSAIL) یک ربات ماهی نرم معرفی کرده اند که میتواند مستقلا در اقیانوس شنا کند.

در اولین آزمایش، SoFi در عمق 50 فوت بیش از 40 دقیقه با چابکی شنا کرد و با لنزهای چشم خود عکسها و فیلمهایی با رزولوشن بالا گرفت.
SoFi با کمک دم مواج و توانایی منحصر بفردش در کنترل شناوری، میتواند در خط مستقیم شنا کند، بچرخد یا به بالا و پایین شیرجه بزند. این گروه همچنین از کنترل کننده Super Nintendoضد آب استفاده کرده و یک سیستم ارتباطی آکوستیک سفارشی ایجاد کردند که قادر است سرعت SoFi را تغییر دهد، ربات را بچرخاند یا حرکت دهد.

Robert Katzschmann مدیر گروه میگوید، این اولین رباتی است که میتواند بدون محدودیت در سه بُعد برای مدت زمان قابل تعمیم شنا کند. او اضافه میکند، ما از اینکه میتوانیم به زندگی دریایی نزدیکتر شویم، هیجان زده شدیم.
ربات ماهی چگونه کار میکند
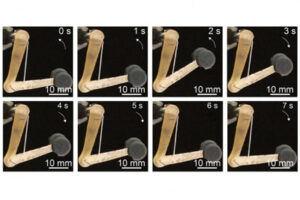
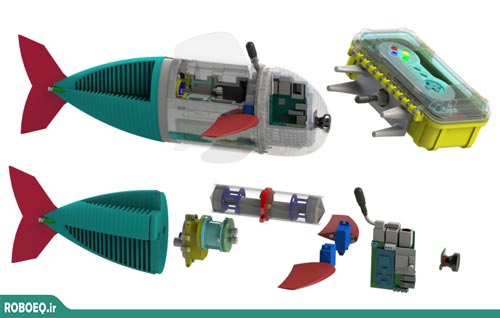
وسایل حرکتی موجود در زیر آب به طور سنتی با قایق ها یا قدرت پروانه های سنگین و گران کنترل میشوند. در مقابل SoFi با یک دوربین، یک موتور و یک باتری پلیمری لیتیوم که در تلفنهای هوشمند مصرف کننده یافت میشود، ساختاری خیلی ساده و سبکتر دارد. برای ساخت ربات شناگر، موتور پمپ آب در داخل دو محفظهی بالن مانند در دم ماهی قرار میگیرد که مشابه یک مجموعه پیستون در موتور عمل میکند. به صورتیکه با هدایت آب به کانال دیگر توسط محرکها دُم در جهت دیگر خم میشود و میچرخد.
این حرکت متناوب یک حرکت جانبی ایجاد میکند که مشابه حرکت ماهی واقعی است. با تغییر الگوهای جریان ربات سیستم هیدرولیکی قادر خواهد بود حرکتهای مختلفی به دُم ربات بدهد که این تحرکات موجب تغییر سرعت شنا کردن میشود.
Cecilia Laschi محقق بیو رباتیک اظهار داشته، دستیابی به برخی از پیشرفتهای فنی در ساخت، نیرو و مقاومت آب به ربات اجازه میدهد بدون مهار کننده حرکت کند. او عنوان کرد رباتهای مشابه ربات ماهی میتوانند برای جستجو به صخره دریایی نزدیک شوند اما حرکت این ربات ماهی امن تر از آنهاست.
جنس نیمه عقب ربات ماهی از پلاستیک سیلیکونی و پلاستیک انعطاف پذیر است. چند قطعه از جمله سر ربات ماهی که کل مدار الکترونیکی در آن قرار دارد با پرینت سه بعدی ساخته شده است. برای کاهش احتمال نشت آب به درون ربات داخل سر و بخشی از بدنه با روغن پر شده است. روغن مایعی است که در هنگام تغییر فشار در جریان شیرجه فشرده نمیشود.
یکی از بزرگترین چالشهای تیم شنای ربات ماهی در عمقهای مختلف است. ربات دو باله در دو طرف دارد که موقعیت ماهی را در پرش به بالا و پایین تنظیم میکند. برای تنظیم موقعیت عمودی، ربات یک بخش تنظیم کننده وزن و یک واحد کنترل شناوری دارد که میتواند چگالی اش را با فشرده سازی و آزاد سازی هوا تغییر دهد.
Katzschmann میگوید تیم توسعه دهنده ربات ماهی SoFiبا هدف ایجاد حداقل اغتشاش ممکن در محیط، از نویز حداقلی موتور برای انتشار اولتراسونیک سیستم ارتباطی تیم، پیامها را با طول موج 30 تا 36 کیلوهرتز ارسال میکنند.
آینده ربات ماهی SoFi
Rus میگوید این ربات قادر است مشاهدات و تعاملات نزدیکی با آبزیان داشته باشد و برای آنها ایجاد نگرانی نمیکند.
این پروژه بخشی از یک کار بزرگتر CSAIL بر روی رباتهای نرم است. این رباتها میتوانند ایمن تر، قویتر و کارآمدتر از رباتهای مشابه آنها با بدنه سخت باشند. کنترل رباتهای نرم در بسیاری موارد از سایر رباتها سادهتر است چرا که محققان نگران برخورد و تصادف آنها نیستند.
در مرحله بعدی، چند کار برای بهبود SoFi انجام خواهد شد. افزایش سرعت ربات ماهی با بهبود سیستم پمپ و باز طراحی بدنه و دم، استفاده از دوربینهای onboard تا ربات ماهی بتواند به صورت خودکار ماهیهای واقعی را دنبال کند، از جمله این برنامههاست. همچنین رباتهایی برای زیست شناسان بسازند، تا چگونگی پاسخ ماهیها به تغییرات محیطی را بررسی کنند.
Rus معتقد است SoFi اولین گام برای توسعه مشاهده گونههای مختلف آبزیان است و این پتانسیل را دارد که ابزار جدیدی برای اکتشافات اقیانوسها باشد و راه جدیدی برای کشف اسرار حیات زیر آب باز کند.