این کنترل کننده بر اساس میکروکنترلر ATmega328 ساخته شده است و کد های آن از پروژه ی MultiWii دریافت شده است. این کنترل کننده دارای شتاب سنج و ژیروسکوپ می باشد که برای کنترل پرواز لازم است.
نحوه اتصال تجهیزات جانبی لازم به کنترل کننده
برای اتصال گیرنده ی رادیو کنترل، اسپید کنترلرها، موتورها و تجهیزات اضافه ی احتمالی (مثل سنسور فشار و یا GPS) به صورت تصویر زیر عمل کنید.
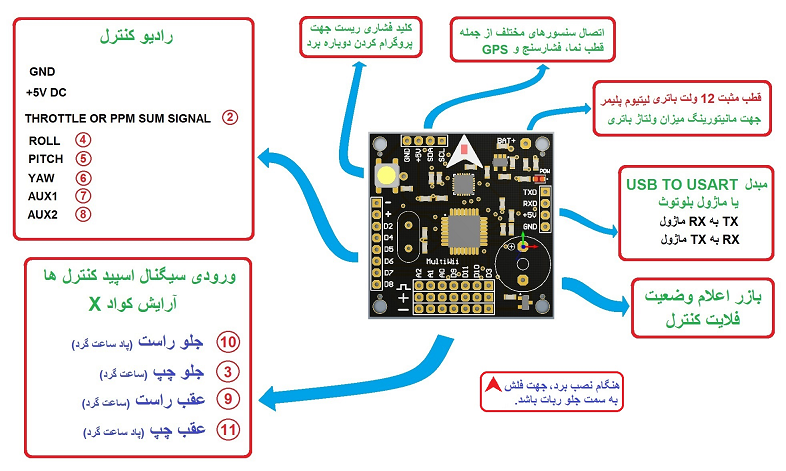
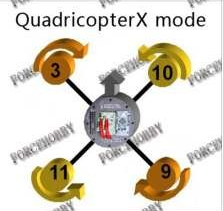
توجه کنید که اتصال موتورها برای کوادکوپتر با آرایش X است که در شکل زیر قابل مشاهده است.
کنترل کننده را به صورتی بر روی کوادکوپتر نصب کنید که فلش سفید رنگ آن به جلو کوادکوپتر اشاره کند و همچنین تا حد امکان به مرکز ثقل کوادکوپتر نزدیک باشد. اصولا این نقطه وسط وسیله ی پرنده می باشد.
برنامه ریزی کنترل کننده پرواز
1.کامپایلر آردوینو را از اینجا نصب کنید.
2.یک مبدل USB به USART مانند این مبدل تهیه و درایور آن را نصب کنید تا آماده به کار شود. (در صورتی که از ویندوزهای 8 و یا 10 استفاده می کنید، اینجا را مطالعه کنید.)
3.فایل Firmware فلایت کنترل را از اینجا دانلود کنید.
4.برد کنترل کننده را توسط مبدل usb to usart به کامپیوتر متصل کنید.
5.برنامه فلایت کنترل موجود در پوشه MultiWii را توسط کامپایلر اردوینو باز کنید
6.از منوی برنامه آردوینو نوع برد را Pro Mini انتخاب کنید. همچنین شماره پورت ارتباطی را انتخاب کنید(این شماره بر اساس اینکه مبدل USB چه شماره ای گرفته است، انتخاب می شود)
7.روی آپلود کلیک کنین و دکمه ریست روی برد را فشار دهید و پایین نگه دارید. به محض مشاهده پیغام Uploading کلید ریست را رها کنید تا کنترل کننده برنامه ریزی شود.
توجه کنید که فلایت کنترل موجود در فروشگاه برنامه ریزی شده است و آماده به کار است.
نحوه بررسی عملکرد کنترل کننده MultiWii و تنظیم آن
بعد از پروگرام کردن کنترل کننده (موارد خرید شده از فروشگاه نیاز به برنامه ریزی ندارد) می توانید آن را به کامپیوتر متصل و عملکرد آن را بررسی کنید. همچنین می توانید تنظیمات کنترل کننده را تغییر دهید. برای این کار مراحل زیر را انجام دهید:
1.فایل برنامه کانفیگ فلایت کنترل را از اینجا دانلود کنید.
2.یک مبدل USB به USART مانند این مبدل تهیه و درایور آن را نصب کنید تا آماده به کار شود. (در صورتی که از ویندوزهای 8 و یا 10 استفاده می کنید، اینجا را مطالعه کنید.)
3.برد کنترل کننده را توسط مبدل usb to usart به کامپیوتر متصل کنید.
4.به پوشه ی MultiWiiConf مراجعه کنید(بعد از Unzip کردن فایل مرحله 1) و سپس بر حسب سیستم عامل مورد استفاده به فولدر مناسب وارد شوید (مثلا فولدر application.windows32 برای ویندوزهای 32 بیتی) و برنامه را اجرا کنید.
5.از قسمت Portcom شماره پورت ارتباطی را انتخاب کنید(این شماره بر اساس اینکه مبدل USB چه شماره ای گرفته است، انتخاب می شود)انتخاب نموده و پس از برقراری ارتباط بر روی دکمه start نرم افزار کلیک کنیدو پس از آن دکمه Read را فشار دهید.
6. در صورت نیاز به کالیبره کردن سنسورها، کوادکوپتر را به صورت کاملا افقی قرار دهید و دکمه calib-Acc را فشار دهید تا سنسورها کالیبره شوند. این کار بعد از هر بار برنامه ریزی فلایت کنترلر لازم است.
در این مرحله می توانید فرامین رادیو کنترل را چک کنید و یا ضرایب PID کنترل کننده را تنظیم کنید.
.png)