ربات نرم چند منظوره از جدیدترین دستاوردهای محققان است.رباتهای نرم الهام گرفته از موجودات زنده برای محیطهایی که دسترسی به آن دشوار است ساخته میشوند. مثل جراحی های ظریف در بدن انسان یا در فضاهای خیلی کوچک و محدود یا فضاهای غیر قابل پیشبینی که برای رباتهای سخت، خطرناک است. در گذشته رباتهای نرم در مقیاس سانتی متر ساخته اند اما تاکنون رباتهای انعطافپذیر چند منظوره که بتواند در مقیاسهای کوچکتر حرکت و عمل کنند وجود نداشته است.
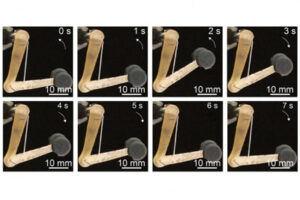
گروهی از محققان فرایند ساخت یکپارچهای را ارائه کرده اند که میتواند برای طراحی رباتهای نرم در مقیاس میلیمتر با خصوصیات مقیاس میکرومتر استفاده شود. برای نشان دادن قابلیتهای این تکنولوژی جدید، آنها یک ربات نرم عنکبوتی که از عنکبوت طاووسی رنگی استرالیایی الهام گرفته شده، ساختند. بدن این ربات از ماده الاستیک مانند با ویژگیهای حرکتی و رنگی ساخته شده است.
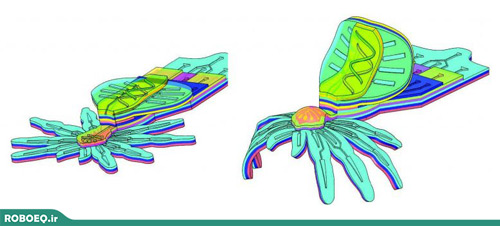
در این تحقیق برای اولین بار از روش لیتوگرافی نرم برای تولید 12 لایه از یک سیلیکون الاستیک استفاده شده که در مجموع بدنهی اصلی عنکبوت نرم را تشکیل داده اند. هر لایه با تکنیک laser-micromachining برش داده میشود و سپس به یکدیگر وصل میشوند تا ساختار سه بعدی عنکبوت نرم را بسازند.
کلید تبدیل این ساختار میانی به طرح پایانی، شبکهی از پیش طراحی شده کانالهای میکروفلوئیدیکتوخالی است که در لایه ها قرار میگیرد. با تزریق رزین به این کانالها ربات شکل میگیرد. کوچکترین رباتهای نرم خیلی ساده هستند و معمولا فقط یک درجه آزادی دارند. اما ربات عنکبوتی با 18 درجه آزادی تشکیل شده و تغییرات ساختاری، حرکتی و رنگ و ویژگی کوچک در محدوده میکرومتر است.
این ربات میتواند روشهای جدیدی برای آندوسکوپی و جراحیهایی که با میکروسکوپ انجام میشود، فراهم کند.