
روش جدید یادگیری ماشین که به رباتها کمک می کند تلفنهای همراه و دیگر قطعات کوچک را در خط تولید مونتاژ کنند.
در بازی جنگا از 54 بلوک مستطیلی استفاده شده که این بلوکها در 18 ردیف روی هم قرار گرفته اند و هر ردیف شامل 3 بلوک است. چینش بلوکها در هر ردیف به صورتی است که با بلوکهای سطح زیر خود موازی و زاویه ای 90درجه در سطح می سازند. در این بازی، در هر حرکت یک بلوک از برج خارج میشود و در بالای برج قرار میگیرد. باید بلوکها به صورتی انتخاب و خارج شوند که توازن برج حفظ شده و سقوط نکند.

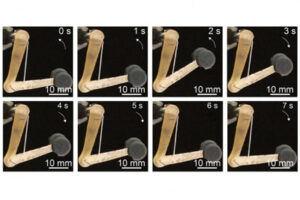
در MIT رباتی طراحی شده که به دقت روی حرکت بعدی خود فکر می کند. این ربات به دنبال بهترین بلوک برای خارج کردن از برج جنگا است بدون آنکه با حذف بلوک، برج فرو بریزد. ربات به آرامی بلوک انتخابی را هل می دهد و در بالای برج قرار می دهد. این ربات به تنهایی بازی میکند و این شگفت انگیز است.
رباتی که توسط دانشمندان MIT توسعه یافته شامل یک گیره چنگالی نرم، یک بازو و یک دوربین خارجی است. وقتی ربات در مقابل برج جنگا قرار میگیرد یک کامپیوتر داده ها را از بازخورد بصری و لمسی دوربین و بازوی ربات ثبت میکند و این اندازه ها را با حرکات قبلی مقایسه و نتایج آن را بررسی میکند. ربات یاد میگیرد که بلوک را فشار دهد و بدون اینکه منجر به سقوط برج سقوط شود آن را از برج خارج کند.
محققان MIT می گویند، توانایی سریع یادگیری بهترین روش برای پیش بردن یک کار است که نه فقط از نشانه های بصری بلکه از تعاملات لمسی و فیزیکی بدست می آید. بر خلاف بازی های شناختی همچون شطرنج، بازی جنگا نیاز به مهارتهای فیزیکی چون هل دادن، کشیدن، جابجا کردن و برقراری حفظ تعادل قطعات دارد.
این کار به درک تعاملات و مهارت دست نیاز دارد. ربات به حرکت و تماس با برج برای یادگیری چطور و کِی جابجا کردن بلوکها نیاز دارد. باید در دنیای واقعی در تعامل با برج واقعی جنگا یادگیری انجام بگیرد، که این نوع شبیه سازی خیلی دشوار است. چالش اصلی، یادگیری از تعداد محدودی آزمایش است. سیستم یادگیری که محققان توسعه دادند می تواند در برنامه هایی فراتر از جنگا که نیاز به تعامل جسمی دقیق دارد مثل جدا سازی مواد بازیافتی از زباله ها و جمع آوری محصولات مصرفی بکار گرفته شود.
یادگیری ماشین
در برنامهریزی ربات برای بازی با جنگا، الگوریتمهایمتداول یادگیری ماشین نیاز به دهها هزار داده دارند که از هرگونه ارتباط و تعامل بین یک بلوک، ربات و برج برای استخراج بلوک بدست آمده اند.
محققان این طرح به دنبال داده های کارآمدتری به منظور یادگیری بازی جنگا توسط ربات بودند که الهام گرفته از شناخت انسان و شیوه ای است که بازی میکند.
این تیم یک بازوی رباتیک استاندارد ABB IRB 120 را برای اینکار سفارشی کردند، سپس برج جنگا را در دسترس ربات قرار دادند و آزمایشهای دوره ای خود را شروع کردند. ربات برای اولین بار به صورت تصادفی یک بلوک را انتخاب می کند و با نیروی کمی آن را هل می دهد تا از برج خارج شود.
در هر فعالیت، اندازههای مرتبط بصری و فیزیکی توسط کامپیوتر ثبت و برچسب گذاری می شود که آیا این حرکت موفقیت آمیز بوده یا خیر. در این روش به جای انجام دهها هزار فعالیت که معادل چندین بار ساخت برج است، ربات فقط با 300 فعالیت آموزش میبیند . اندازه ها و نتایج مشابه در خوشه های رفتارهای مشخص گروه بندی میشود.
برای نمونه یک خوشه ممکن است فعالیت بلوکی را نشان دهد که دارای حرکتی سخت بوده است. در مقابل آن یکی دیگر در خوشه حرکت ساده تر یا دیگری در خوشه ای که در هنگام حرکت آن برج واژگون شده قرار بگیرد. در هر خوشه از داده ها، ربات مدل ساده ای را برای پیش بینی رفتار بلوک با توجه به اندازه های بصری و لمسی در نظر می گیرد. این تکنیک خوشه سازی که از روش طبیعی رفتار انسان الهام گرفته شده است به طور قابل توجهی کارایی را افزایش می دهد و ربات می تواند سریعتر بازی را یاد بگیرد.
محققان در یک شبیه سازی کامپیوتری از بازی با استفاده از شبیه ساز MuJoCo، این روش را در برابر دیگر الگوریتم های یادگیری ماشین آزمایش کردند. آنها برای این الگوریتمها همان اطلاعاتی را که سیستم خودشان بدست آورده بود استفاده کردند و دیدند چطور آنها بازی جنگا را در سطحی مشابه یاد میگیرند. در مقایسه بین این روش و سایر الگوریتمها، سایر روشها نیاز به دستورات بیشتری برای یادگیری این بازی دارند. . تیم تحقیقاتی به صورت غیر رسمی با چند داوطلب آن را آزمایش کردند و مشاهده کردند یادگیری ماشین آنها بر خلاف روش بازیکنان انسانی عمل میکند.
اگر پژوهشگران قصد داشته باشند ربات با بازیکن انسانی رقابت کنند باید روش دیگری را دنبال کنند که علاوه بر تعاملات فیزیکی، استراتژی هم داشته باشد. برای مثال خارج کردن فقط بلوک راست باعث می شود کار حریف برای بیرون کشیدن بلوک بدون افتادن برج سخت شود.
در حال حاضر این گروه علاقه ای به توسعه ربات برای مبارزه با حریف انسانی ندارد و بیشتر تمرکز آنها بر روی افزایش مهارتهای ربات در دیگر حوزه های کاربردی است.




{kind=link}