در صورتیکه بخش های قبلی پروژه را مطالعه نکرده اید حتما به بخش اول (چگونه یک ربات بسازیم؟) مراجعه کنید و از ابتدا پروژه را مطالعه کنید.
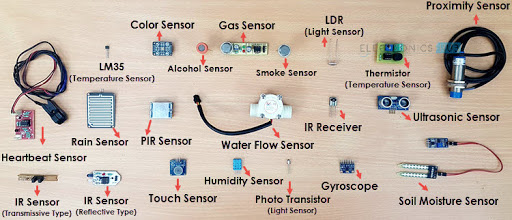
بخش هفتم – انواع سنسورها یا حسگرها
رباتها برخلاف انسانها که فقط از پنج حس بویایی، لامسه، بینایی، شنیداری و چشایی بهره مند هستند از انواع حسگر یا سنسور الکترومکانیکی برای کشف و درک محیط اطراف و خودشان استفاده می کنند. تقلید حس های یک موجود زنده بسیار کار دشواری است، بنابراین محققان و توسعه دهندگان به جای حس های بیولوژیکی، حسهای دیگری تعریف کرده اند.
انسانها چه چیزی را می توانند حس کنند که رباتها نمی توانند؟

رباتها می توانند ببینند اما درک این موضوع که دقیقا به چه چیزی نگاه می کنند برایشان سخت است. با استفاده رباتها با استفاده از دوربین می توانند تصویری از میلیون ها پیکسل را انتخاب کنند اما بدون اینکه برنامه نویسی شوند، نمی دانند منظور از هر یک از این پیکسل ها چیست. حسگرهای تشخیص فاصله می توانند فاصله تا یک شی را مشخص کنند، اما نمی توانند مانع برخورد ربات با آن شی شوند. محققان و شرکتها در حال آزمایشات گوناگونی هستند تا به ربات این امکان را بدهد که نه تنها ببیند بلکه آنچیزی را که می بیند را نیز درک کند و بشناسد. ممکن است مدت زیادی طول بکشد تا یک ربات بتواند بین اشیایی که فرضاً بر روی یک میز قرار دارند تمایز قایل شود به خصوص اگر مشابه آنچه که در پایگاه داده اش بوده، نباشند.
درک کردن مزه و بو برای رباتها کار بسیار سختی است. انسان به راحتی می تواند مزه یا بو را تشخیص دهد در حالیکه یک ربات نیاز به تجزیه و تحلیل ترکیب شیمیایی و سپس جستجوی آن در پایگاه داده اش دارد تا مشخص کند که آیا انسان این طعم را فرضاً شیرین عنوان کرده یا بو را بد تشخیص داده است. تا به امروز درخواست زیادی در این زمینه که رباتها بتوانند بو و طعم را تشخیص دهند نشده است، به همین دلیل برای ایجاد سنسورهای مناسب نیز تلاش زیادی نشده است.
انسانها دارای سلولهای عصبی در سراسر پوست خود هستند و به همین دلیل به محض تماس پوست خود با یک شی سریعا آن را حس می کنند. رباتها به دکمه ها یا حسگرهای ساده ای که در جاهای خاصی از ربات قرار گرفته – اند فرضاً در قسمت جلویی ربات تجهیز شده اند تاهنگام تماس با یک شی سریعاً آن را حس کنند. سنسورهایی که در رباتهای حیوانات خانگی قرار دارند معمولاً در سر، پا و پشت آنها قرار گرفته است و به همین ترتیب اگر قسمتی از ربات را لمس کنید که سنسوری در آن وجود نداشته باشد، ربات چیزی را حس نخواهد کرد و واکنشی نشان نمی دهد. شاید در آینده ربات های انسان نمایی طراحی شوند که پوست الکترومکانیکی داشته باشند.
رباتها چه چیزی را می توانند حس کنند که انسانها نمی توانند؟
اگرچه ربات نمی تواند به شما بگوید که ماده ای طعم خوبی دارد یا بوی بد می دهد، اما با تجزیه و تحلیل ترکیبات شیمیایی می تواند اطلاعات بسیار بیشتری را نسبت به یک انسان عادی در مورد خواصش به دست آورد. یک ربات مجهز به سنسور مونو اُکسید کربن قادر به تشخیص گاز مونوکسید کربن است در صورتیکه گازی بی رنگ و بی بو است و انسان قادر به انجام چنین کاری نیست. همچنین ربات می تواند سطح Ph یک ماده را تعیین کند که اسیدی یا بازی است و خیلی مسائل دیگر. انسانها نمی توانند فقط با دیدن فاصله دقیق یک شی را بگویند ولی رباتهای مجهز به سنسور فاصله می توانند فاصله را کاملا دقیق ارائه دهند.
علاوه بر این، ربات می تواند شتاب زاویه ای یا خطی دقیقی را که از یک شی در حال چرخش ارائه دهد، در حالیکه انسانها فقط چرخیدن شی را می بینند و زاویه چرخش را نمی توانند تعیین کنند. همچنین انسان می تواند بدون اینکه شیی را لمس کند و فقط بر اساس تجربیاتش سرد یا گرم بودن آن را تشخیص دهد در حالیکه یک دوربین حرارتی می تواند یک تصویر حرارتی دو بعدی از آنچه در جلوی آن است، ارائه دهد. اگرچه انسان ها دارای پنج حس اصلی هستند، اما رباتها می توانند تقریباً نامتناهی از سنسورهای مختلف داشته باشند.
سنسور یا حسگر مناسب برای هر ربات
ابتدا باید مشخص کنید که ربات شما قرار است چه کاری بکند و سپس با توجه به بخش های زیر، تعیین کنید که چه سنسورهایی نیاز است.
سنسورهای تماسی


سنسورهای سوئیچ ، کلید و تماسی برای تشخیص تماس فیزیکی بین اشیاء استفاده می شوند. ضربه گیرهای ربات را می توان به کلید فشاری لحظه ای مجهز کرد تا بتواند اشیاء را در فواصل مختلف حس کند.
- مزایا : کم هزینه، قابلیت ادغام شدن و قابل اعتماد می باشد.
- معایب : تنها از یک معیار اندازه گیری استفاده می کند.
سنسور فشار
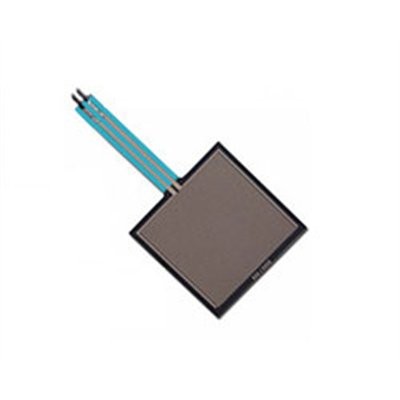
بر خلاف کلید فشار که فقط دو حالت ( ON یا OFF ) را به خروجی ارسال می کند، یک سنسور فشار، خروجی متناسب با نیرویی را که بر روی آن اعمال می شود، تولید می کند.
- مزایا : می توان میزان نیروی متفاوتی به آن وارد کرد و با توجه به میزان نیروی وارد شده، عملکردی را نشان دهد.
- معایب : ممکن است مقدار دقیقی ارسال نکند و استفاده از آنها نسبت به سوئیچ ها سخت تر است.
فاصله سنج

ماژول فاصله سنج آلتراسونیک
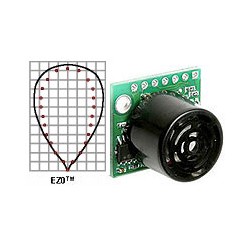
ماژول فاصله سنج آلتراسونیک از علم اصوات برای اندازه گیری زمان بین ارسال سیگنال تا وقتیکه صدای آن برگردد، استفاده می کند. فاصله سنج آلتراسونیک می تواند طیف وسیعی از فاصله را اندازه بگیرد، اما بطور اختصاصی در هوا استفاده می شوند و تحت تأثیر بازتاب مواد مختلفی هستند.
- مزایا : تا چندین متر فاصله را می تواند اندازه گیری کند.
- معایب : عوامل محیطی می توانند بر نتیجه این سنسورها تأثیر بگذارند.
مادون قرمز ( Infrared )

مادون قرمز ، همانطور که در بخش قبلی مشاهده کردید در متدهای کنترل ربات استفاده می شود، حال می بینید که برای اندازه گیری فاصله نیز استفاده می شود. برخی از سنسورهای مادون قرمز یک فاصله خاص را اندازه گیری می کنند در حالیکه برخی دیگر خروجی متناسب با فاصله یک شی را ارائه می دهند.
- مزایا : کم هزینه ، نسبتاً قابل اعتماد و دقیق می باشد.
- معایب : میزان فاصله کمتری را به نسبت فاصله سنج آلتراسونیک اندازه می گیرد.
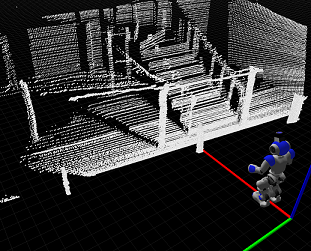
لیزر

زمانیکه به دقت بالا یا اندازه گیری فواصل دور نیاز است از لیزرها استفاده می کنند. فاصله سنج های لیزری برای اندازه گیری فاصله ربات از اشیاء از لیزرهای چرخشی استفاده می کنند تا بتوانند فواصل را به صورت دو بعدی اسکن کنند.
- مزایا : دقت بسیار بالایی دارند و می توانند اشیاء را از فواصل دور نیز تشخیص دهند.
- معایب : بسیار گرانتر از سنسورهای مادون قرمز یا فاصله سنج آلتراسونیک هستند.
انکودر
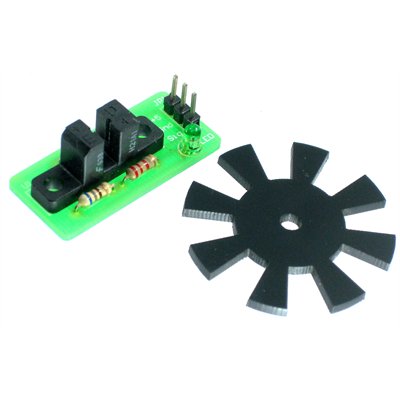
انکودر نوری از یک جفت ( فرستنده / گیرنده ) کوچک مادون قرمز استفاده می کند و سیگنالها را زمانیکه پرتوی مادون قرمز توسط یک دیسک چرخان طراحی شده (که بر روی یک شافت چرخان قرار دارد) شکسته شود، ارسال می کند. تعداد دفعات شکسته شدن پرتو با زاویه کل طی شده توسط چرخ متناظر است. با دانستن شعاع چرخ می توانید کل مسافتی که با چرخ طی شده، تعیین کنید. استفاده از دو انکودر در دو بعد، فاصله نسبی را به شما می دهد.
- مزایا : به فرض عدم وجود لغزش، مقدار جابجایی، مطلق است. اغلب روی شافت عقب موتور نصب میشود.
- معایب : برنامه نویسی بیشتری نیاز دارد و هزینه بالایی دارند.
پتانسیومتر خطی با سیم مقاومت

یک پتانسیومتر خطی قادر به اندازه گیری موقعیت مطلق یک شی می باشد. سیم مقاومت نیز بسته به جایی که نیرو اعمال شود، مقاومت را تغییر می دهد.
- مزایا : موقعیت مطلق را ارائه می دهد. یک سیم مقاومت جهت اینکه در یک موقعیت معین اعمال شود، نیاز به فشار دارد.
- معایب : فاصله را در رنج بسیار کوچکی اندازه می گیرد.
سنسورهای کششی و خمشی

یک سنسور کششی از موادی تشکیل شده است که مقاومت آن با توجه به میزان کشش تغییر می کند. سنسور خمشی معمولاً از موادی تشکیل شده که مقاومت یکی از لایه ها بسته به میزان خمش آن تغییر می کند. از آن می توان برای تعیین زاویه یا چرخش کوچک استفاده کرد، به عنوان مثال چقدر انگشت خم شده است.
- مزایا : در مواردی که محور چرخش ، داخلی یا غیرقابل دسترس باشد کاربرد دارد.
- معایب : خیلی دقیق نیست و فقط می توان زاویه های کوچک را با آن اندازه گیری کرد.
دوربین استریو

دقیقاً مانند چشم های انسان، دو دوربین که با فاصله ی مشخص از هم قرار گرفته اند می توانند اطلاعات عمیقی را ارائه دهند. می توان گفت که رباتهای مجهز به دوربین یکی از قدرتمندترین و پیچیده ترین رباتهای تولید شده هستند. یک ربات دوربین دار ، همراه با نرم افزار مناسب، می تواند اشیا و رنگها را تشخیص دهد.
- مزایا : می تواند اطلاعات عمیق و بازخورد خوبی در مورد محیط اطراف ربات ارائه دهد.
- معایب : نیاز به پایگاه داده و برنامه نویسی پیچیده ای دارد.
موقعیت یاب

موقعیت یاب داخلی ( مکان یابی داخل ساختمان )

یک سیستم موقعیت یاب داخلی از دستگاه های دیگر موجود در یک ساختمان یا خانه استفاده می کند تا موقعیت ربات را مشخص کند در حالیکه سنسورهای دیگر از دوربین یا نشانگرها استفاده می کنند.
- مزایا : بهترین انتخاب برای ثبت موقعیت مطلق می باشد.
- معایب : به برنامه نویسی پیچیده و نشانگر نیاز دارد.
GPS
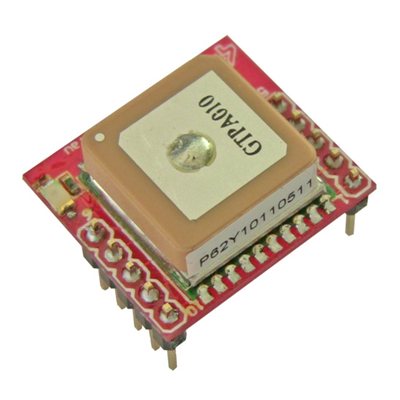
GPS از سیگنال های چندین ماهواره که به دور زمین می چرخند استفاده می کند تا مختصات جغرافیایی ربات را تعیین کند. GPS واقعی می تواند موقعیت جغرافیایی را تا 5 متر دقیقا ارائه دهد در حالیکه سیستم های پیشرفته تر شامل پردازش داده ها و تصحیح خطا با استفاده از GPS یا IMU فقط می توانند موقعیت را دقیقاً تا چند سانتی متر ارائه دهند.
- مزایا : نیازی به نشانگر یا منابع دیگر ندارد.
- معایب : فقط می تواند در خارج از ساختمان یا خانه عمل کند.
سنسورهای چرخشی
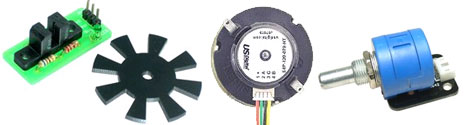
پتانسیومتر

پتانسیومتر چرخشی در اصل تقسیم کننده ولتاژ است و یک ولتاژ آنالوگ متناسب با زاویه ای که سر ولوم چرخانده شده است را فراهم می کند.
- مزایا : ساده برای استفاده ، ارزان و دقیق است و موقعیت مطلق ربات را ارائه می دهد.
- معایب : بیشتر آنها محدود به چرخش 300 درجه هستند.
ژیروسکوپ
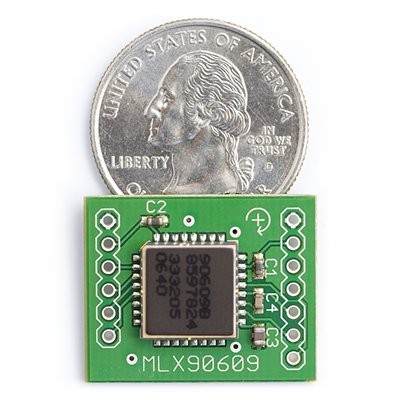
یک ژیروسکوپ الکترونیکی شتاب زاویه ای را اندازه گیری می کند و سیگنال مربوطه ( ولتاژ آنالوگ ، ارتباط سریال ، I2C و غیره ) را ارائه می دهد.
- مزایا : اجزای مکانیکی متحرک ندارد.
- معایب : سنسور ژیروسکوپ دائماً در معرض شتاب زاویه ای قرار دارد در حالیکه میکروکنترلر همیشه نمی تواند ورودی پیوسته و دائمی دریافت کند، به این معنی که ممکن است برخی از مقادیر ورودی از بین بروند و میکروکنترلر نتواند پاسخ درستی بدهد.
انکودر

انکودر نوری همانطور که قبلاً نیز گفته شده از یک جفت ( فرستنده / گیرنده ) کوچک مادون قرمز استفاده می کند و سیگنالها را زمانیکه پرتوی مادون قرمز توسط یک دیسک چرخان طراحی شده (که بر روی یک شافت چرخان قرار دارد) شکسته شود، ارسال می کند. تعداد دفعات شکسته شدن پرتو با زاویه کل طی شده توسط چرخ متناظر است. یک انکودر مکانیکی با استفاده از یک دیسک خیلی کوچک و دارای حفره، قادر به خواندن زوایای خاص است. از انکودرهای مکانیکی می توان برای اندازه گیری چرخش مطلق و نسبی استفاده کرد.
- مزایا : کاملاً دقیق است.
- معایب : در انکودرهای نوری، زاویه نسبت به موقعیت شروع حرکت، نسبی است و در واقع مطلق و دقیق نیست.
سنسورهای حساس به شرایط محیط

فتوسل

یک فتوسل می تواند برای اندازه گیری شدت یک منبع نور اعم از طبیعی یا مصنوعی استفاده شود. معمولاً میزان مقاومت آن متناسب با شدت نور است.
- مزایا : معمولاً بسیار ارزان و پرکاربرد است.
- معایب : نمی تواند منبع یا نوع نور را تفکیک کند.
سنسور میکروفون

سنسور میکروفون در واقع یک میکروفون است که متناسب با میزان نویزی که در محیط وجود دارد، یک ولتاژی را بر می گرداند. بردهای پیچیده تر ، داده های میکروفون را دریافت می کنند و صدا را شناسایی می کنند.
- مزایا : ارزان و قابل اعتماد هستند.
- معایب : هر چه داده های ورودی پرمعناتر باشند برنامه نویسی آن نیز پیچیده تر خواهد بود.
سنسور حرارتی

سنسورهای حرارتی ، میزان دمای رباتی که بر آن سوار شده یا محیط را اندازه گیری می کنند.
- مزایا : بسیار دقیق هستند.
- معایب : هر چه سنسورها دقیق تر و پیچیده تر باشند استفاده از آنها سخت تر خواهد بود.
دوربین حرارتی
تصویر برداری حرارتی یا مادون قرمز به ربات اجازه می دهد تا هر تصویری که در جلوی دوربین قرار بگیرد را به صورت یک تصویر حرارتی دو بعدی بگیرد. با این روش میزان دمای هر جسمی که روبروی آن باشد را تعیین میکند.
- مزایا : اشیاء را از پس زمینه بر اساس امضای حرارتی شان متمایز می کند.
- معایب : این سنسورها گران هستند.
سنسور رطوبت
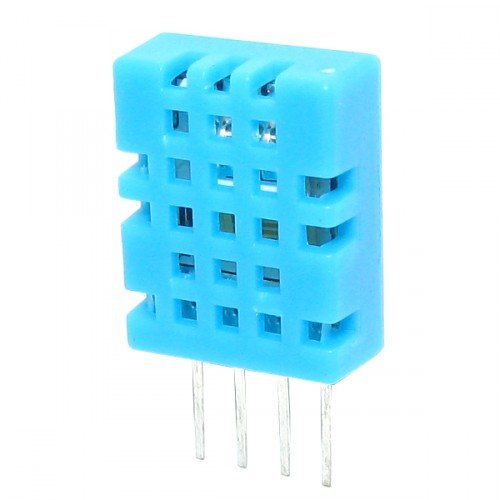
سنسور رطوبت ، درصد آب موجود در هوا را تشخیص داده و اغلب در کنار آن یک سنسور دما قرار دارد.
سنسور فشار

سنسور فشار برای اندازه گیری فشار اتمسفر استفاده می شود و تصویری از ارتفاع یک پهپاد ارائه دهد.
سنسور گاز

سنسور گاز برای تشخیص وجود و غلظت انواع گازهای مختلف به کار می رود. معمولاً از سنسورهای گاز در نرم افزارهای خاص رباتیک استفاده می شود.
- مزایا : تنها سنسورهایی هستند که برای تشخیص دقیق گاز استفاده می شوند.
- معایب : سنسورهای ارزان قیمت ممکن است که پاسخ غلطی بدهند یا اینکه پاسخ دقیقی ندهند و بنابراین نباید برای کاربردهای مهم استفاده شوند.
سنسور مغناطیس

سنسور مغناطیس یا مغناطیس سنج ، مغناطیس یا مغناطیسی بودن یک جسم را تشخیص می دهد. بهتر است که موقعیت مکانی مغناطیس را بدانیم.
- مزایا : فلزهای فرو مغناطیس را نیز می تواند تشخیص دهد.
- معایب : اگر جسمی مغناطیس زیادی داشته باشد ممکن است که سنسور را خراب کند.
رفتار سنج ( جهت حرکت ، اوج ، تعادل )

قطب نما
قطب نمای دیجیتال ، جهت خود را با توجه به قطب های مغناطیسی با استفاده از میدان مغناطیسی زمین تعیین می کند. ممکن است که ربات کاملاً در حالت افقی قرار نگرفته باشد به همین دلیل از قطب نما استفاده می کنیم.
- مزایا : جهت یابی مطلق را ارائه می دهد.
- معایب : دقت بیشتر سبب افزایش قیمت وسیله می شود.
ژیروسکوپ
ژیروسکوپ های الکترونیکی زاویه شیب را در یک یا چند محور مختصات ارائه می دهند. سنسورهای شیب مکانیکی معمولاً با استفاده از مقداری جیوه در یک کپسول شیشه ای یا یک توپ رسانا تعیین می کنند که آیا ربات از مقدار معینی کج شده است یا خیر.
- مزایا : سنسورهای شیب الکترونیکی نسبت به سنسورهای مکانیکی از دقت بالاتری برخوردار هستند.
- معایب : گران قیمت هستند.
سنسور شتاب

سنسور شتاب ، شتاب گرانشی یا هر شتاب دیگری را که ربات در معرض آن قرار می گیرد را اندازه گیری می کند. اگر ربات شما نتواند از محیط اطراف برای محاسبه مسافتی که طی کرده، استفاده کند، می تواند گزینه مناسبی برای تقریب مسافت طی شده باشد. شتاب سنجها می توانند شتاب را در امتداد یک، دو یا سه محور اندازه گیری کنند.
- مزایا : برای عملکردشان به هیچ مرجع یا نشانگر خارجی نیاز ندارند و می توانند جهت گیری مطلق یا نسبی را با توجه به گرانش بدست آورند.
- معایب : فقط می توانند مسافت طی شده را تقریب بزنند و نمی توانند مقدار دقیق آن را بدست آورند.
سنسور IMU

IMU یا ( واحد اندازه گیری اینرسی ) متشکل از یک شتاب سنج چند محوره و یک ژیروسکوپ چند محوره و گاهی اوقات یک مغناطیس سنج چند محوره می باشد تا بدین ترتیب بتواند دقیق تر اندازه گیری ( اندازه گیری جهت حرکت ، اوج و تعادل ) کند.
- مزایا : یک روش بسیار مطمئن برای رفتار سنجی ربات بدون استفاده از منابع خارجی حتی میدان مغناطیسی زمین می باشد.
- معایب : بسیار گران قیمت است و استفاده از آن پیچیده است.
متفرقه
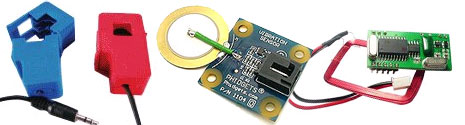
سنسور جریان و ولتاژ

سنسورهای جریان و ولتاژ همانگونه که از نامشان مشخص است جریان و ولتاژ یک مدار الکتریکی را اندازه گیری می کنند. کاربرد آن برای محاسبه مدت زمانیکه ربات شما کار خواهد کرد، می باشد که در واقع با اندازه گیری میزان ولتاژ باتری این کار را انجام می دهد یا اینکه با اندازه گیری جریان عبوری از موتورهای ربات ، تعیین میکند که آیا موتورها خیلی سخت کار می کنند یا خیر.
- مزایا : عملکردشان دقیق است.
- معایب : می تواند ولتاژ یا جریان اندازه گیری شده را مختل کند. گاهی اوقات مداری که اندازه گیری میشود باید اصلاح شود.
سنسور مغناطیس
سنسور مغناطیس یا مغناطیس سنج ، اجسام مغناطیسی را تشخیص می دهد و برای این کار باید با جسم مورد نظر تماس داشته باشد یا اینکه به آن جسم کاملاً نزدیک باشد. چنین سنسورهایی را می توان در ماشین چمن زنی خودکار برای تشخیص سیم تعبیه شده در چمن (که همان محدوده ی حرکت ربات خواهد بود) استفاده کرد.
- مزایا : ارزان قیمت است.
- معایب : معمولاً باید به جسم مورد نظر بسیار نزدیک باشد و متأسفانه نمی تواند فلزات غیر مغناطیسی را تشخیص دهد.
سنسور لرزش ( ارتعاش )
سنسور ارتعاش یا لرزش یک شی را با استفاده از پیزوالکتریک یا تکنولوژی های دیگر تشخیص می دهد.
RFID

سنسورهای شناسایی فرکانس رادیویی از تگ های RFID استفاده می کنند که در اندازه و شکل های متفاوتی همچون کارت اعتباری، دیسک کوچک یا یک کلید زنجیره ای یا دستبدی شکل یا شکلهای دیگر وجود دارند. هنگامیکه تگ RFID در فاصله خاصی از یک دستگاه Reader سیستم RFID قرار می گیرد، سیگنالی توسط تگ RFID ارسال می شود که حاوی یک شناسه منحصر به فرد است و دستگاه Reader آن را دریافت می کند و آن تگ را شناسایی می کند.
- مزایا : تگ های RFID معمولاً ارزان قیمت هستند و با ارسال یک شناسه منحصر به فرد ، قابل شناسایی هستند.
- معایب : تنها در صورتیکه تگ در رنج فاصله ی تعریف شده باشد، قابل شناسایی است و برای فواصل دور کاربرد ندارد.
مثال عملی
برای درک بهتر مطالبی که در بالا عنوان کردیم در زیر دو نمونه ربات را بیان می کنیم و با توجه به کارکرد مورد انتظار از ربات ، تعیین می کنیم که چه سنسورهایی مورد نیاز است:
- اگر بخواهیم رباتی طراحی کنیم که شخصی را دنبال کند:
- آیا به دنبال تشخیص، اندازه گیری فاصله تا ربات یا تماس با ربات هستید؟
- بله و به احتمال زیاد سنسورهای تماسی بهترین انتخاب هستند.
- آیا می خواهید میزان چرخش ربات را اندازه بگیرید؟
- شاید، اما شما واقعاً لازم نیست بدانید که ربات چرخانده شده یا اینکه شخص هدایت کننده ربات ، چرخیده است.
- آیا می خواهید شرایط محیطی را اندازه بگیرید؟
- خیر. ممکن است شناسایی انسان براساس امضای حرارتی اش کار نسبتا راحتی باشد اما تشخیص تفاوت انسان از حیوانات کار بسیار دشواری است.
- آیا می خواهید موقعیت مکانی، جهت گیری ربات یا زاویه شیب یا چرخش ربات را اندازه گیری کنید؟
- بله و GPS بهترین گزینه می باشد.
خب حالا که دسته های اصلی را برای انتخاب نوع سنسورها مشخص کردیم باید سنسورهای مورد نیاز این ربات را در هر دسته انتخاب کنیم. برای این منظور به بررسی ویژگی های اساسی سنسورهای این دسته ها باید پرداخت:
- تماسی : بی ربط است زیرا ربات از راه دور انسان را دنبال می کند.
- فاصله سنج :
- آلتراسونیک ، مادون قرمز و لیزر : اندازه گیری فاصله هنگام ترکیب با سنسورهای دیگر مفید است.
- دوربین : بهترین انتخاب است.
- کششی : این امر باعث می شود که انسان به ربات متصل شود، چیزی که ما نمی خواهیم.
- چرخشی : بی ربط است.
- موقعیت یاب :
- GPS : قرار دادن یک GPS بر روی ربات و انسان باعث می شود ربات به راحتی انسان را در شعاع مشخصی دنبال کند.
- حساس به شرایط محیط : بی ربط است.
- رفتار سنج :
- شتاب سنج : چندان مفید نیست زیرا در تشخیص موقعیت مکانی انسان به ربات هیچ کمکی نمی کند.
- IMU : مفید نیست زیرا در تشخیص موقعیت مکانی انسان به ربات هیچ کمکی نمی کند.
- متفرقه :
- RFID : یک دستگاه Reader سیستم RFID می تواند تگ موجود در اطراف خود را پیدا کند و ممکن است که گزینه خوبی باشد اما در اینمورد باید تحقیقات بیشتری انجام داد.
بنابراین از بین گزینه های موجود، مناسب ترین سنسورها برای این ربات ، سنسور آلتراسونیک یا مادون قرمز ، دوربین و GPS می باشد. دوربین برای شناسایی یا تشخیص امضای حرارتی انسان توسط ربات است و GPS که هم بر روی ربات و هم انسان قرار دارد به ربات کمک می کند تا در صورت تشخیص ندادن انسان به کمک دوربین، بتواند انسان را پیدا کند و مادون قرمز که یک سنسور فاصله سنج است سبب می شود که ربات به انسان برخورد نکند و در یک فاصله ی معینی نسبت به انسان بماند.
- اگر بخواهیم یک ربات ماشین چمن زنی طراحی کنیم که در محدوده ی باغچه قرار گیرد و از آن خارج نشود:
- آیا به دنبال تشخیص، اندازه گیری فاصله تا ربات یا تماس با ربات هستید؟
- بله ، ما به دنبال تشخیص یک مرز هستیم.
- آیا می خواهید میزان چرخش ربات را اندازه بگیرید؟
- خیر.
- آیا می خواهید شرایط محیطی را اندازه بگیرید؟
- در حال حاضر نه، ولی از اونجاییکه ربات در محیط بیرون قرار دارد ممکنه بعدا نیاز شود.
- آیا می خواهید موقعیت مکانی، جهت گیری ربات یا زاویه شیب یا چرخش ربات را اندازه گیری کنید؟
- خیر.
پس گروه های سنسور فاصله سنج ، تماسی ، تشخیص دهنده و شاید حساس به شرایط محیط مناسب این نوع ربات هستند. با توجه به گروه های مشخص شده سنسورهای زیر برای طراحی ماشین چمن زنی مناسب هستند:
- تماسی :
- برای تشخیص اجسامی که ربات با آنها برخورد می کند تا هنگام برخورد متوقف نشود یا به طور کلی برخورد نکند.
- فاصله سنج :
- آلتراسونیک ، مادون قرمز و لیزر : به ربات کمک می کند تا از برخورد به اشیاء خودداری کند و همچنین به ربات کمک می کند تا از افتادن در چاله های آبی جلوگیری کند.
- چرخشی :
- انکودر : به ربات کمک می کند تا در فضای دو بعدی نسبت به موقعیت شروع خود، موقعیت یابی کند.
- موقعیت یاب :
- GPS : این انتخاب ایده آل است زیرا با استفاده از آن می توان به ربات دستور داد تا در مختصات خاصی بماند.
- حساس به شرایط محیط :
- سنسور رطوبت : با استفاده از این سنسور ، ربات می تواند بین چمن که محیط مرطوبی است و سطوح غیر مرطوب مثل بتن یا آسفالت تمییز دهد.
- سنسور مغناطیس :
- سنسورهای مغناطیس در داخل و خارج از منزل برای مشخص کردن مرزها استفاده می شوند. مرز چمن با یک نوار رسانا مشخص شده و ربات به چند سنسور مغناطیس مجهز شده است تا بتواند مرز را تشخیص دهد و از آن خارج نشود.
- رفتار سنج :
- IMU : موجب می شود تا داده های بدست آمده از انکودرها دقیق تر شوند، به خصوص اگر زمین شیب دار یا ناهموار باشد.
- متفرقه: بی ارتباط است.
ادامه این پروژه به زودی در بخش هشتم (ابزار مورد نیاز در ساخت ربات) قرار خواهد گرفت…






{kind=link}