یکی از مهمترین مشخصه های یک هلیکوپتر، توانائی آن برای ثابت نگهداشتن دمش و غلبه بر گشتاور ملخها است .گشتاور نتیجه انتقال نیروی چرخشی از طریق اتصالات مکانیکی به روتور هلیکوپتر است .نیرویی که ملخهای هلیکوپتر را میچرخاند، یک نیروی مساوی و در جهت مخالف به اتصالات انتقال نیرو وارد میکند که به بدنه هلیکوپتر متصلند .اگر این نیرو کنترل نشود، موجب چرخیدن هلیکوپتر بدور خودش با سرعت زیاد خواهد شد .خوشبختانه هلیکوپترها دارای مکانیزمی هستند که هم گشتاور را خنثی میکند و هم کنترل حرکت جانبی را فراهم می آورد .

روشهای رایج در کنترل حرکت چرخشی در هلیکوپتر های رادیو کنترل
کنترل چرخش با روتور دم
رایجترین روش کنترل چرخش در هلیکوپترهای رادیو کنترل، استفاده از روتور دم است .روتور دم در فاصله معینی از محور روتور اصلی ، بر روی میله دم قرار میگیرد تا بتواند گشتاور ناشی از چرخش ملخهای اصلی هلیکوپتر را خنثی نماید .روتور دم هم میتواند بوسیله اتصالات مکانیکی به محور روتور اصلی متصل شده باشد و هم میتواند دارای یک موتور الکتریکی مجزا باشد .در روش اول، روتور دم با سرعتی متناسب با سرعت چرخش روتور اصلی میچرخد که این نسبت حدود 5.4 به 1 است .تراست روتور دم بوسیله کم و زیاد کردن زاویه ملخهای دم کنترل میشود.
کنترل چرخش هلیکوپتر با دو روتور اصلی مجزا
هلیکوپترهائی که دارای دو روتور اصلی مجزا هستند، دارای برتری گشتاوری نسبت به هلیکوپترهای تک روتور هستند زیرا هر یک از روتورها بر خلاف جهت روتور دیگر میچرخد و بنابراین گشتاور یکدیگر را خنثی میکنند .اما مزیت حذف روتور دم در این هلیکوپترها با میکس آیرودینامیکی و افت انتقال از بین میرود .در این هلیکوپترها برای کنترل پرواز و مانور، هنوز هم نیاز به کنترل چرخش هلیکوپتر هست .در این تیپ هلیکوپترها، از کنترل سایکلیک تفاضلی برای کنترل چرخش هلیکوپتر بدور خودش استفاده میشود .نیروی چرخشی با اعمال نیروی سایکلیک مخالف در روتور جلو و عقب ایجاد میگردد.

کنترل چرخش تفاضلی هم محور
هلیکوپترهای کواکسیال یا دو ملخ هم محور مانند لاما، از گشتاور تفاضلی برای کنترل چرخش هلیکوپتر استفاده میکنند .در حین پرواز، هر دوی ملخها در خلاف جهت یکدیگر میچرخند و بنابراین گشتاور همدیگر را خنثی میکنند .برای ایجاد حرکت چرخشی در هلیکوپتر، دور یکی از روتورها افزایش یافته و دور روتور دیگر به همان نسبت کاهش می یابد .تفاضل سرعت باعث ثابت ماندن مقدار توان خالص میشود ولی یک عدم برابری در گشتاورها ایجاد میشود که باعث چرخش هلیکوپتر میگردد.

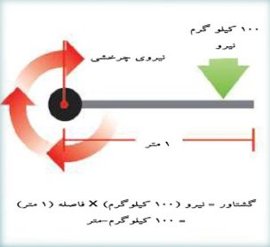
تعریف گشتاور
گشتاور عبارت است از نیروی پیچشی وارد شده بر یک نقطه .این نیرو را میتوان با نیروی وارد شده بر یک اهرم که در یک نقطه بصورت چرخشی اعمال میشود توضیح داد .مقدار گشتاور با افزایش طول اهرم و یا نیروی وارده بر آن افزایش می یابد. هنگامی که گشتاور در یک دور چرخشی خاص اعمال میگردد، توان ایجاد میشود .گشتاور اعمال شده به محور اصلی هلیکوپتر است که توان لازم برای پرواز را ایجاد مینماید .برای این کار، یک گشتاور معکوس به بدنه هلیکوپتر اعمال میشود.
تسمه و چرخ دنده
این سیستمها تشکیل شده اند از یک چرخ دنده اصلی بزرگ که به یک چرخ دنده کوچکتر و یک پولی وصل میشود .این نوع طراحی را میتوان در بسیاری از هلیکوپترها در اندازه های مختلف مشاهده نمود .تنها مزیت این سیستم، کم خرج بودن و راحتی تعمیرات آن است .برای تعمیرات میتوان میله دم را براحتی جدا نمود .یک نقطه ضعف برای این سیستم این است که سیستم پولی دارای نیروی مقاومتی بیشتری است که منجر به افت جزئی انرژی اتوروتیشن میشود.

تسمه و پولی
این نوع طراحی دارای دو پولی است .یک پولی بزرگ در شفت اصلی و یک پولی کوچکتر در شفت روتور دم که با یک تسمه به هم وصل اند .این سیستم را در برخی هلیکوپترها مانند 4 Wasp Vمیتوان دید .مهمترین برتری این سیستم، سادگی در طراحی و وزن کمتر آن است . همچنین امکان لقی و سر خوردن تسمه کمتر است و نیز نیروی مقاومتی در انتقال نیرو نیز بطور چشمگیری کاهش یافته است .تنها نکته منفی در این نوع طراحی، تعمیر آن است بدین معنی که برای تعویض تسمه بایستی محور اصلی را ابتدا جدا نمود.

شفت
روتورهای دمی که از شفت برای انتقال نیرو بهره میبرند، از دو چرخ دنده مورب در دو سر میله دم و یک شفت بلند در درون میله دم استفاده میکنند .این شفت کار انتقال نیرو از شفت اصلی به روتور دم را انجام میدهد .این سیستم دارای نیروی مقاوم بسیار کمی در انتقال نیرو است که آن را برای انجام مانور اتوروتیشن ایده آل میکند .از آنجائی که تماس مستقیم چرخ دنده ها با هم وجود دارد، مشکل سر خوردن هیچگاه وجود نخواهد داشت و کنترل دم همیشه برقرار خواهد بود.کار بر روی سیستمهای روتور شفت دار بسیار ساده و راحت است و نیازی به خارج ساختن شفت اصلی وجود ندارد .یک نکته منفی در خصوص این سیستم، امکان سائیده شدن چرخ دنده ها در صورت برخورد ملخهای دم با زمین است .وزن دم در این سیستم کمی بیشتر است و تاثیر کمی در راندمان کلی هلیکوپتر میگذارد که البته با وجود نیروی مقاومتی کم این سیستم، جبران میشود.

استفاده از موتور
روتورهائی که از موتور نیرو میگیرند، معمولا دارای گام ثابت هستند .مقدار تراست لازم برای روتور دم معمولا بوسیله کم و زیاد کردن دور موتور بدست می آید .یک مزیت برای این سیستم، کاهش چشمگیر وزن و هزینه است .مزیت دیگر آن این است که در انجام مانور اتوروتیشن، قدرت روتور دم همیشه یکسان میماند .اکثر هلیکوپترهای ارزان قیمت مناسب برای مبتدیان مانند Honey Beeاز این سیستم بهره میبرند .یک نکته منفی در خصوص سیستمهای با گام ملخ ثابت این است که تحت بار متغیر این احتمال میرود که روتور تحت تاثیر اثر گردابی خودش قرار گرفته و در غلبه بر گشتاور ناتوان شود.

سیستم محرکه اتوروتیشن
اکثر هلیکوپترهای رادیو کنترل دارای یک سیستم محرکه اتوروتیشن هستند .یک چرخ دنده دیگر بمنظور رساندن نیروی ثابت برای جرخش روتور دم، حتی در صورت از کار افتادن موتور، مورد استفاده قرار میگیرد .اگر از این چرخ دنده استفاده نشود و روتور دم نیروی خود را مستقیما از چرخ دنده اصلی بگیرد، با حذف موتور، روتور دم از حرکت می ایستد.

مقایسه ای بین هلیکوپترهای گام ثابت ( (FPو گام متغیر ((CP

اگر شما در زمینه هلیکوپترهای رادیو کنترل تازه کار هستید، ممکن است که از خود بپرسید که فرق بین یک هلیکوپتر گام ثابت و یک هلیکوپتر گام متغیر در چیست؟
این سوالی است که برای اکثر مبتدیان در شروع کار و هنگام تصمیم گیری برای خرید هلیکوپتر پیش می آید. عده ای از مبتدیان بخاطر نداشتن آشنائی کافی، در ابتدای کار به سراغ مدلهای گام متغیر میروند و این کار ممکن است باعث شود که برای همیشه پرواز هلیکوپتر را کنار بگذارند. برای آشنائی بیشتر شما با این هلیکوپترها، مقایسه ای بین آنها انجام داده ایم .
گام در هلیکوپترهای رادیو کنترل به زاویه ای گفته میشود که ملخ هلیکوپتر نسبت به سطح افق میسازد. هلیکوپتر گام ثابت دارای ملخهائی است که زاویه آنها در حالات مختلف ثابت میماند. این هلیکوپترها برای مبتدیان مناسبترند زیرا وجود یک چیز کمتر برای کنترل نمودن، پرواز را آسانتر میکند. در هلیکوپترهای گام ثابت، مقدار نیروی بالا برنده فقط با تغییر سرعت چرخش روتور کم و زیاد میشود و نه با تغییر زاویه ملخها. با افزایش سرعت چرخش روتور، نیروی بالا برنده افزایش می یابد و هلیکوپتر بالا میرود. کاهش سرعت چرخش موتور به معنی کاهش نیروی بالا برنده بوده و باعث میشود که هلیکوپتر پائین بیاید.

هلیکوپترهای پیشرفته تر، از گام متغیر بهره میبرند
در اینگونه هلیکوپترها، ملخها متحرک هستند و میتوانند زوایای مختلفی را نسبت به افق بگیرند که بدین وسیله نیروی بالابرنده کم و زیاد میگردد. تغییر گام ملخ از طریق میکس خودکار بواسطه تغییر تراتل )شدت گاز( کنترل میگردد.

حالا که با طرز کار این دو سیستم آشنا شدیم، به تفاوتهای عمده این دو اشاره میکنیم:
گام ثابت
- سرهم کردن و تنظیم هلیکوپترهای گام ثابت آسانتر است.
- دارای قطعات متحرک کمتری هستند.
- ارزانتر هستند
- پرواز دادن آنها کمی آسانتر از هلیکوپترهای با گام متغیر است.
- با این مدلها فقط میتوان هاور و پرواز رو به جلو و طرفین انجام داد.
- در صورت سقوط، هزینه کمتری برای تعمیرات برمیدارند.
- اگر در ارتفاع موتور هلیکوپتر خاموش شود، هلیکوپتر به یک جسم صلب تبدیل شده و سقوط میکند.
گام متغیر
- بعلت وجود قطعات متحرک بیشتر، مونتاژ و تعمیرات آنها مشکلتر است.
- قیمت گرانتری نسبت به مدلهای گام ثابت دارند.
- پرواز دادن آنها از مدلهای گام ثابت سخت تر است.
- با این هلیکوپترها میتوان هرگونه حرکت و مانوری را انجام داد.
- در صورت بروز سانحه، زمان و هزینه بیشتری را برای تعمیرات میطلبند. در صورت توقف موتور این مدلها در ارتفاع، امکان گلاید کردن و فرود آمدن ایمن با آنها بواسطه سیستم اتوروتیشن وجود دارد.
با این توصیفها و مقایسه بین این مدلها، به این نتیجه میرسیم که مدلهای گام ثابت میتوانند برای کسانی که در زمینه هلیکوپترهای رادیو کنترل تازه کار هستند، انتخاب خوبی باشند. این افراد میتوانند بعد از کسب مهارت در پرواز با این هلیکوپترها، سراغ مدلهای گام متغیر رفته و پرواز D3را شروع کنند.