یک استپر موتور گیربکس دار میتواند مناسب باشد. فرض کنید هر گام 1.8 درجه است، پس هر دور کامل شامل 200 دور است. عامل بعدی که باید درنظر داشته باشید قطر قرقره است. دقت، تابعی از پالس های کلاک شما خواهد بود، اما هر پالس 1.8 درجه خواهد چرخید. سپس تغییر جهت است که با استپر موتور به راحتی انجام می شود، طورادامه مطلب ...
یک استپر موتور گیربکس دار میتواند مناسب باشد. فرض کنید هر گام 1.8 درجه است، پس هر دور کامل شامل 200 دور است. عامل بعدی که باید درنظر داشته باشید قطر قرقره است. دقت، تابعی از پالس های کلاک شما خواهد بود، اما هر پالس 1.8 درجه خواهد چرخید. سپس تغییر جهت است که با استپر موتور به راحتی انجام می شود، طوری که 12 ساعت بالا برود و 12 ساعت پایین بیاید. سرعت و جابه جایی به اندازه پالس های ساعت شما دقیق خواهند بود. امروزه اسیلاتورهای بسیار دقیق و ارزان قیمتی موجود هستند که میتوانید از آنها استفاده کنید. عواملی مانند مکانیک به فضا و محیط موردنظرتان و نیز محاسبات مربوط به قرقره شما بستگی دارد. مطمئن شوید که پالس های ساعت شما تحت یک محدوده دمایی گسترده، ثابت و پایدار باشند.
طبق مدار زیر به یک خازن 1000 میکروفاراد 25 ولت و مقاومت های R1 و R2 با مقادیر 18 کیلواهم و 2.2 کیلواهم و یک موتور که حدود یک ثانیه به حرکت در میآید، نیاز خواهید داشت. قطع تغذیه باعث میشود خازن دشارژ شده و زمانی که مجددا تغذیه وصل میشود، موتور دوباره برای یک ثانیه به حرکت در میآید. برای انتخاب مادامه مطلب ...
طبق مدار زیر به یک خازن 1000 میکروفاراد 25 ولت و مقاومت های R1 و R2 با مقادیر 18 کیلواهم و 2.2 کیلواهم و یک موتور که حدود یک ثانیه به حرکت در میآید، نیاز خواهید داشت. قطع تغذیه باعث میشود خازن دشارژ شده و زمانی که مجددا تغذیه وصل میشود، موتور دوباره برای یک ثانیه به حرکت در میآید. برای انتخاب مقادبر بهینه برای مقاومت ها، شما باید جریان مصرفی مورد نیاز موتور و بهره دو ترانزیستور را بدانید. اگر به مدار زیر نگاه کنید، می بینید که من یک دیود D1 بین کلکتور ترانزیستور Tr1 و بیس ترانزیستور Tr2 قرار دادم ولی ضروری نیست.
توصیه میکنم مدار را با ترانزیستور Tr2 و دو مقاومت در بیس آن ببندید. تغذیه را اعمال کنید و ببینید موتور میچرخد یا نه؟ سپس خازن و دو مقاومت را قرار دهید و ببینید چطور با اعمال تغذیه، ولتاژ دو سر خازن افزایش مییابد. دو مقاومت را به گونه ای انتخاب کنید که ولتاژ به حدود 1 ولت برسد. هنگامی که ولتاژ به 0.6 ولت میرسد، ترانزیستور Tr1 روشن می شود که بیس ترانزیستور Tr2 زمین شده و خاموش میشود.
موتور معکوس با سرعت دقیق
یک استپر موتور گیربکس دار میتواند مناسب باشد. فرض کنید هر گام 1.8 درجه است، پس هر دور کامل شامل 200 دور است. عامل بعدی که باید درنظر داشته باشید قطر قرقره است. دقت، تابعی از پالس های کلاک شما خواهد بود، اما هر پالس 1.8 درجه خواهد چرخید. سپس تغییر جهت است که با استپر موتور به راحتی انجام می شود، طورادامه مطلب ...
یک استپر موتور گیربکس دار میتواند مناسب باشد. فرض کنید هر گام 1.8 درجه است، پس هر دور کامل شامل 200 دور است. عامل بعدی که باید درنظر داشته باشید قطر قرقره است. دقت، تابعی از پالس های کلاک شما خواهد بود، اما هر پالس 1.8 درجه خواهد چرخید. سپس تغییر جهت است که با استپر موتور به راحتی انجام می شود، طوری که 12 ساعت بالا برود و 12 ساعت پایین بیاید. سرعت و جابه جایی به اندازه پالس های ساعت شما دقیق خواهند بود. امروزه اسیلاتورهای بسیار دقیق و ارزان قیمتی موجود هستند که میتوانید از آنها استفاده کنید. عواملی مانند مکانیک به فضا و محیط موردنظرتان و نیز محاسبات مربوط به قرقره شما بستگی دارد. مطمئن شوید که پالس های ساعت شما تحت یک محدوده دمایی گسترده، ثابت و پایدار باشند.
مشخصات عمومی را وارد کنیدحرکات چرخشی خودکار
طبق مدار زیر به یک خازن 1000 میکروفاراد 25 ولت و مقاومت های R1 و R2 با مقادیر 18 کیلواهم و 2.2 کیلواهم و یک موتور که حدود یک ثانیه به حرکت در میآید، نیاز خواهید داشت. قطع تغذیه باعث میشود خازن دشارژ شده و زمانی که مجددا تغذیه وصل میشود، موتور دوباره برای یک ثانیه به حرکت در میآید. برای انتخاب مادامه مطلب ...
طبق مدار زیر به یک خازن 1000 میکروفاراد 25 ولت و مقاومت های R1 و R2 با مقادیر 18 کیلواهم و 2.2 کیلواهم و یک موتور که حدود یک ثانیه به حرکت در میآید، نیاز خواهید داشت. قطع تغذیه باعث میشود خازن دشارژ شده و زمانی که مجددا تغذیه وصل میشود، موتور دوباره برای یک ثانیه به حرکت در میآید. برای انتخاب مقادبر بهینه برای مقاومت ها، شما باید جریان مصرفی مورد نیاز موتور و بهره دو ترانزیستور را بدانید. اگر به مدار زیر نگاه کنید، می بینید که من یک دیود D1 بین کلکتور ترانزیستور Tr1 و بیس ترانزیستور Tr2 قرار دادم ولی ضروری نیست.
توصیه میکنم مدار را با ترانزیستور Tr2 و دو مقاومت در بیس آن ببندید. تغذیه را اعمال کنید و ببینید موتور میچرخد یا نه؟ سپس خازن و دو مقاومت را قرار دهید و ببینید چطور با اعمال تغذیه، ولتاژ دو سر خازن افزایش مییابد. دو مقاومت را به گونه ای انتخاب کنید که ولتاژ به حدود 1 ولت برسد. هنگامی که ولتاژ به 0.6 ولت میرسد، ترانزیستور Tr1 روشن می شود که بیس ترانزیستور Tr2 زمین شده و خاموش میشود.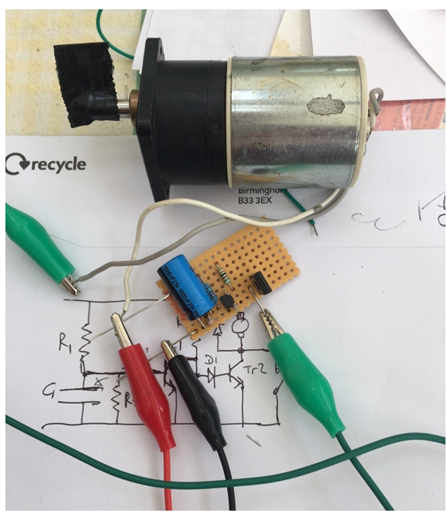
مشخصات عمومی را وارد کنید