
در صورتیکه بخش های قبلی پروژه را مطالعه نکرده اید حتما به بخش اول (چگونه یک ربات بسازیم؟) مراجعه کنید و از ابتدا پروژه را مطالعه کنید.
بخش دوم – انتخاب نوع ربات
در طراحی ربات اولین مسائلی که با آن مواجه می شویم این است که ربات ما قرار است چه کاری انجام دهد و چه شکلی باشد. تنوع رباتها بسیار زیاد است که البته معروفترین آنها در زیر بیان شده:
رباتهای چرخ دار، زنجیری و پادار
هواپیماها، هلی کوپترها و بالون ها
قایقها، زیر دریایی ها و رباتهای شناگر
رباتهای بازودار و دستگیره دار
رباتهای ترکیبی
در این قسمت به شما کمک می کنیم که با توجه به هدفتان نوع ربات را تعیین کنید.
رباتهای زمینی
رباتهای زمینی به ویژه نوع چرخ دار آنها جز محبوب ترین رباتهای همراه بین مبتدیها هستند چرا که نیاز به سرمایه گذاری کمی دارند.
از طرف دیگر پیچیده ترین رباتها ، رباتهای انسان نما هستند، زیرا نیاز بیشتری به آزادی در محدوده حرکتی و همسان سازی حرکت موتورها دارد و از سنسورهای زیادی استفاده می کنند.
رباتهای چرخدار

رباتهای چرخدار از محبوبترین نوع رباتهای همراه هستند و در ابعاد و اندازه های مختلفی است. اندازه چرخهای این نوع رباتها متفاوت است و تا 30 سانتی متر نیز می باشد.
رباتهای چرخدار که یک میز کوچک در بالای خود دارند، کوچکترین چرخها را دارند و معمولا قطر آنها کمتر از 5 سانتی متر است. تعداد چرخهای رباتها متفاوت است ولی عموما 3 یا 4 چرخ دارند. معمولا رباتهای سه چرخ از دو چرخ کنار هم و تک چرخ جدا (که در انتها و یا جلوی ربات می باشد) تعبیه شده است.
بیشتر رباتهای پیشرفته ی دوچرخ از سنسور ژیروسکوپ استفاده می کنند. معمولا برای ساخت رباتهای چرخدار ساده از هر سیستمی استفاده نمی شود ولی برای رباتهای حمل کننده چرخدار ( همانند تانک ) امکان دارد. ساخت سیستم جعبه فرمان که در اتومبیل ها وجود دارد برای رباتهای چرخدار نیاز به قطعات زیادی دارد که هم پیچیده است و هم هزینه اش از مزایایش بیشتر است.
رباتهای چهار و شش چرخ به ازای هر چرخ یک موتور دارند و این مزیت محسوب می شود چرا که باعث ایجاد تعادل بیشتر در این رباتها شده است. چرخ های مکانوم و اومینی قابلیت تغییر جهت در تمام زوایا را دارند و در صورتیکه برای ربات استفاده شوند محدوده حرکت ربات را توسعه می بخشند. اشتباه رایج در ساخت ربات چرخدار این است که رباتهایی که با موتورهای با قیمت پایین و بزرگ ساخته می شوند اندازه متوسطی دارد در صورتیکه فاکتورهای زیادی در اینمورد موثر است.
مزایا
- نسبت به رباتهای دیگر کم هزینه تر است.
- طراحی و ساخت ساده دارند.
- امکان انتخاب فراوان به دلیل تنوع در این رباتها وجود دارد.
- کیفیت رباتهای چرخدار شش چرخ و بیشتر شبیه یا بهتر از رباتهای زنجیری است.
- بهترین انتخاب برای مبتدی ها می باشد.
معایب
- ممکن است در حرکت تعادل شان را از دست بدهند.
- سطح بسیار کوچکی از چرخها با زمین در تماس است.
رباتهای زنجیری

رباتهای تانک از چرخهای زنجیری استفاده می کنند. هر چند که این چرخ های زنجیری امکان چرخش را به رباتها نمی دهد ولی باعث تعادل بیشتر در این نوع رباتها شده است و همچنین به دلیل توزیع وزن ربات در کل سطح آن سبب شده تا این رباتها بتوانند بر روی سطوح شل و سست مانند شن و ماسه به خوبی حرکت کنند. یک ربات زنجیری که کمی انعطاف پذیری نیز داشته باشد به راحتی می تواند از روی دست اندازها حرکت کند.
اکثر مردم معتقدند که رباتهای تانک یک چهره خشن برای دنیای رباتها ایجاد کرده است.
مزایا
- به دلیل سطح تماس کافی که با زمین دارند تعدل شان کاملا حفظ می شود.
- به دلیل وزن توزیع شده ربات در کل سطح می تواند بر روی انواع سطوح حرکت کند.
- فاصله این رباتها از سطح زمین بدون استفاده از چرخهای بزرگتر به راحتی قابل افزایش است.
معایب
- هنگام چرخش در رباتهای زنجیری، به دلیل تولید نیروی کناری در آنها موجب تخریب سطح مورد استفاده شان و ساییدگی در زنجیر چرخشان می شود.
- رباتهای زنجیری متنوع نیستند.
- چرخ زنجیری به کار رفته در این رباتها موجب شده تا تعداد موتورهای به کار رفته در آن محدود شود.
- پیچیدگی مکانیکی و اتصالات در این رباتها زیاد می باشد.
رباتهای پادار

بیشتر رباتها برای حرکتشان از پا استفاده می کنند. رباتهای پادار اغلب برای سطوحی که بسیار ناهموار هستند استفاده می شوند. رباتهای پادار مبتدی معمولا شش پا دارند تا تعادل شان به خوبی حفظ شود. حفظ تعادل در رباتهای پاداری که تعداد پای کمتری دارند سختتر است و نیاز به “پایداری پویا” دارند. ربات پادار اگر در هنگام گام برداشتن متوقف شود احتمالا سقوط خواهد کرد. رباتهای پادار با دو پا، چهار پا و شش پا از معروفترین این رباتها هستند البته محققین در حال پژوهش درباره ربات پادار با تک پا هستند.
مزایا
- سیستم حرکتی شان بسیار شبیه به حرکت انسان است.
- به راحتی می توانند بر روی ناهموارترین سطوح هم حرکت کنند و از روی موانع صعب العبور عبور کنند.
معایب
- از لحاظ مکانیکی، الکترونیک و کدنویسی بسیار پیچیده تر است.
- با وجود نیاز به انرژی بیشتر ، باتری به کار رفته در این رباتها کوچکتر شده است.
- برای ساخت این رباتها هزینه بالایی نیاز است.
رباتهای هوایی

AUAV (یک هواپیمای خودکار بدون سرنشین) بسیار جذاب است و بسیاری از علاقه مندان به ربات می توانند این ربات را طراحی کنند. هرچند ، مزیت ساخت رباتهای هوایی کاملا خودکار، خصوصا برای مبتدی ها به نسبت خطرات آن کمتر است. بیشتر علاقه مندان به سیستمهای هوایی، همچنان از هواپیماهای کنترل از راه دور تجاری موجود استفاده می کنند. حرفه ای ها، از ربات هواپیمای ارتش آمریکا “predator” که به صورت نیمه خودکار بود استفاده می کردند که البته به تازگی ماموریت هایش را به صورت خودکار انجام می دهد.
مزایا
- هواپیمای کنترل از راه دور سالهاست که وجود دارد و جمعیت زیادی به آن علاقه مند هستند.
- برای مسائل نظارتی کاربرد دارد.
معایب
- کل سرمایه گذاری تان ممکن است که در یک تصادف از بین برود.
- جامعه رباتیک برای بخش پشتیبانی کنترل رباتهای هوایی خودکار بسیار محدود است.
رباتهای آبی

بسیاری از علاقه مندان به ساخت ربات و کمپانی ها و شرکت ها به ساخت رباتهای زیردریایی بدون سرنشین روی آورده اند. هرچند در سالهای اخیر، برخی از کمپانی های تجاری رباتهای تمیزکننده استخر ساخته اند ولی همچنان تعداد علاقه مندان به این حوزه در جامعه رباتیک کم است. رباتهای زیردریایی از محفظه های فشرده ی هوا استفاده می کنند، محوری، دم، باله یا حتی بال دارند تا بتوانند در آب شناور شوند.
مزایا
- بیشتر سیاره زمین را آب تشکیل می دهد پس فضای زیادی برای جستجو و کاوش وجود دارد.
- طراحی این رباتها عموما منحصر به فرد است.
- در استخر قابل استفاده هستند.
معایب
- در شرایط مختلفی مثل (غرق شدن، نشت کردن، گرفتار شئ یا موجودات دریایی شدن) ممکن است که از بین بروند.
- بیشتر قطعات الکترونیکی با محیطهای آبی سازگاری ندارند
- عبور از عمق 10متر یا بیشتر نیازمند سرمایه گذاری و تحقیق بیشتری است..
- برای پشتیبانی در این بخش، جامعه رباتیک بسیار کوچک هستند.
- تکنولوژی ارتباط بی سیم در زیر آب محدود است.
رباتهای ترکیبی و متفرقه
ممکن است که ایده شما برای ساخت ربات در هیچ یک از موارد بالا قرار نگیرد یا ترکیبی از چند بخش با هم باشد. دقت کنید که هدف این آموزش ساخت رباتهای متحرک است. هنگام ساخت رباتهای ترکیبی باید با این دیدگاه که هر بخش به صورت جداگانه تست شود پیش بروید. رباتهای ترکیبی مثل “hovercraft”، مار شکل، برجک و غیره می توان نام برد.
مزایا
- برای نیازهای خاص کاربرد دارند.
- شامل ماژول های زیادی است و در واقع چند وظفیه ای هستند.
- تنوع و کارایی رباتها را افزایش می دهد.
معایب
- نیاز به هزینه زیادی دارد و پیچیدگی ساخت آن نیز بالاست.
- نیاز به ساخت و طراحی ویژه ای برای بخش های مختلف این رباتها دارید.
رباتهای بازودار و دستگیره دار

هرچند که این رباتها در دسته رباتهای متحرک قرار نمی گیرند ولی مبحث رباتیک با قضیه ی بازو و دستگیره یا آهنربای متصل به آن شروع شد. رباتهای بازودار و دستگیره دار بهترین نمونه برای ارتباط با محیط پیرامون و کاوش در محیط هستند. یک ربات بازودار ساده فقط یک حرکت دارد، در حالیکه رباتهای بازودار پیشرفته محدوده ی حرکتی وسیعتری دارند.
مزایا
- طراحی ساده ترین تا پیچیده ترین مدل ربات بازودار امکان دارد.
- به راحتی می توانید یک ربات بازودار با 3 یا 4 محدوده ی حرکتی طراحی کنید.
معایب
- این نوع ربات در اصل ثابت است مگر اینکه بر روی یک سطح متحرک قرار بگیرد.
- هزینه ساخت این نوع رباتها با توجه به میزان قابلیتهای آن تعیین می شود و اگر بخواهید هزینه تان کمتر بشود باید قابلیتهای رباتتان را کاهش دهید.
مثال عملی
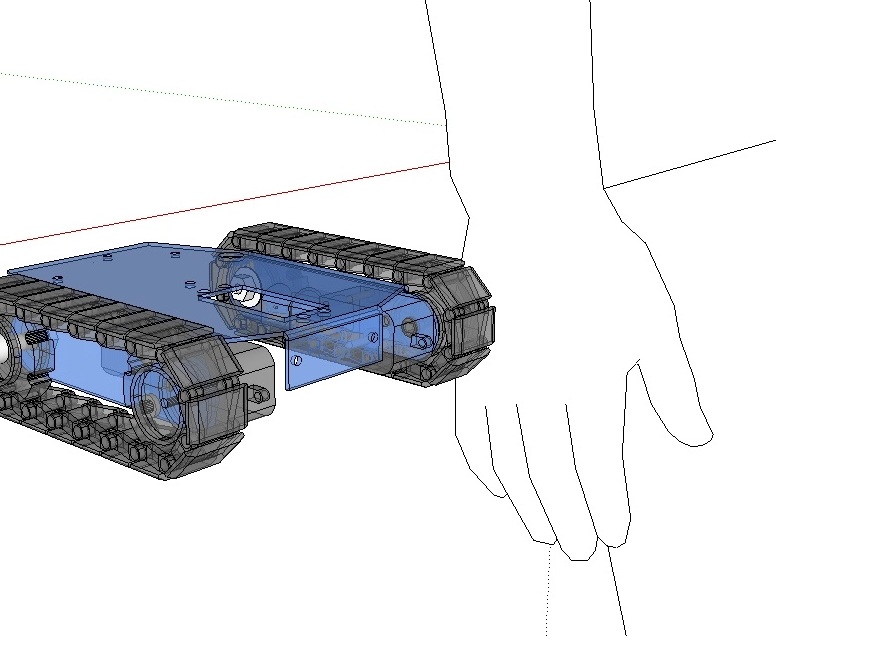
ما در این مقاله سعی کردیم رباتی بسازیم که علم رباتیک را به بهترین حالت بیان کند. برای این منظور یک سطح که قابلیت قرارگیری چندین سنسور را دارد و همچنین چرخهای زنجیری که عملکردشان بهتر از چرخهای ساده است، فراهم کردیم. برای اینکه هزینه ها را کاهش دهیم، تصمیم به ساخت یک ربات رومیزی که قابلیت گردش در داخل خانه و همچنین حرکت روی میز را دارد، گرفتیم.
ربات ما بسیار سبک وزن است. شکل زیر ربات مورد نظر ماست:
ادامه این پروژه را در بخش سوم ( انتخاب نوع موتور محرک ربات ) مطالعه کنید.






{kind=link}