
در صورتیکه بخش های قبلی پروژه را مطالعه نکرده اید حتما به بخش اول (چگونه یک ربات بسازیم؟) مراجعه کنید و از ابتدا پروژه را مطالعه کنید.
بخش پنجم – کنترلر موتور چیست؟
کنترلر موتور وسیله ای الکترونیکی است (معمولاً به شکل یک صفحه مدار لخت و بدون محفظه می باشد) که به عنوان یک واسطه بین میکروکنترلر ، منبع تغذیه یا باتری و موتورها عمل می کند.اگرچه میکروکنترلر (مغز ربات) سرعت و جهت حرکت موتورها را تعیین می کند، ولی به دلیل قدرت خروجی بسیار محدود (جریان و ولتاژ) آن، نمی تواند مستقیماً آنها را هدایت کند. از طرف دیگر، کنترلر موتور می تواند جریان را در ولتاژ مورد نیاز تأمین کند اما نمی تواند تصمیم بگیرد که موتور باید چقدر سریع بچرخد. بنابراین، میکروکنترلر و کنترلر موتور باید با هم کار کنند تا موتورها به حرکت درآیند.
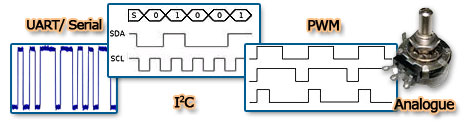
میکروکنترلر می تواند از طریق روش های ارتباطی استاندارد مانند UART (سریال a.k.a) یا PWM به کنترلر موتور دستور دهد که چگونه نیروی موتورها را تأمین کند. همچنین، برخی از کنترلرهای موتور را می توان به صورت دستی توسط یک ولتاژ آنالوگ کنترل کرد ( ولتاژ آنالوگ معمولاً با پتانسیومتر ایجاد می شود).
اندازه و وزن یک کنترلر موتور می تواند از کوچکتر از نوک انگشت شما برای کنترل یک ربات mini sumo تا یک کنترلر بزرگ با وزن چند کیلوگرم، به میزان قابل توجهی متفاوت باشد. وزن و اندازه یک کنترلر موتور معمولاً تأثیر حداقل بر روی کارایی ربات دارد، تا زمانیکه وارد مبحث ربات های کوچک یا هواپیماهای بدون سرنشین بشوید. اندازه یک کنترلر موتور معمولاً مرتبط به حداکثر جریانی است که می تواند فراهم کند. جریان بزرگتر به معنای استفاده از سیم هایی با قطر بزرگتر است.
انواع کنترلرهای موتور
از آنجا که انواع مختلفی موتور محرک وجود دارد (همانطور که در بخش سوم صحبت کردیم)، کنترلرهای موتور مختلفی نیز وجود دارد که در زیر آورده شده است:
- کنترلر موتور DC: در موتورهایDC ، موتور گیربکس DC و بسیاری از موتورهای محرک خطی استفاده می شود.
- کنترلر موتور DC براشلس : در موتورهای DC براشلس استفاده می شود.
- کنترلرهای سروو موتور : در سروو موتور R/C مورد استفاده قرار می گیرند.
- کنترلرهای استپ موتور : بسته به نوع آنها در اتسپ موتور تک قطبی یا دو قطبی استفاده می شوند.
انتخاب کنترلر موتور
کنترلر موتور باید پس از انتخاب نوع موتور محرک انتخاب شود. میزان جریانی که موتور به سمت خود می کشد به میزان قدرت موتور بستگی دارد. یک موتور DC کوچک جریان زیادی مصرف نمی کند، اما نمی تواند قدرت زیادی هم تولید کند، در حالیکه یک موتور بزرگ می تواند قدرت بیشتری تولید کند البته برای این کار به جریان بیشتری نیز نیاز دارد.
کنترلر موتور DC
- نکته اول ولتاژ اسمی موتور است. کنترلر موتور DCدر یک محدوده خاص ولتاژ ، موتورها را کنترل می کند.به عنوان مثال، اگر موتور شما با ولتاژ اسمی 3 ولت کار می کند، نباید یک کنترلر موتور را انتخاب کنید که تنها می تواند یک موتور را بین 6 تا 9 ولت کنترل کند. این مساله به شما کمک می کند تا برای انتخاب نوع کنترلر موتور برخی از آنها را از لیست حذف کنید.
- پس از اینکه کنترلر موتور مناسب را که توانایی تامین قدرت لازم موتور را برای ولتاژ مورد نظر داشته باشد، پیدا کردید نکته بعدی تامین جریان دائمی است که کنترلر نیاز دارد. باید کنترلر موتوری را انتخاب کنید که جریان برابر یا بالاتر از میزان جریان دائمی مصرفی موتور زمانیکه زیر بار است، تولید کند. اگر یک کنترلر موتور 5 آمپر برای یک موتور 3 آمپر انتخاب کنید، موتور فقط به همان اندازه که نیاز دارند جریان می کشد. از طرف دیگر، اگر موتور شما 5 آمپر نیاز داشته باشد و یک کنترلر 3 آمپری به آن متصل کنید، کنترلر موتور را می سوزاند. بسیاری از تولید کنندگان موتور، جریان ایستا ( stall current ) موتور DC را ارائه می دهند، که البته اطلاع از جریان ایستای موتور برای انتخاب نوع آن به تنهایی کافی نیست و حتما باید مقدار جریان دائمی را بدانیم. به هر حال اگر نتوانید جریان دائمی موتور را پیدا کنید، یک قانون ساده برای آن وجود دارد به طوریکه جریان دائمی موتور در حدود 20٪ تا 25٪ جریان ایستا است. همه کنترلرهای موتور DC جریان حداکثری را که در دامنه شان تعریف شده، تولید می کنند. در انتخاب کنترلر مطمئن باشید که این جریان حدود دو برابر جریان دائمی موتور باشد. هنگامیکه موتور نیاز به تولید نیروی بیشتری داشته باشد (مثلا برای بالا رفتن از روی یک شیب تند)، به جریان بیشتری نیز نیاز دارد پس کنترلر موتوری که جریان حداکثرش دو برابر جریان مورد نیاز موتور باشد و همچنین محافظ حرارتی نیز داشته باشد، انتخاب کنید.
- انتخاب نوع متد و روش کنترل موتور یکی دیگر از مسائل مهمی است که باید به آن توجه شود. متدهای کنترل ، شامل ولتاژ آنالوگ ،I2C ،PWM ، R / C، UART ( seriala.k.a.) می باشد. هنگام استفاده از هر نوع میکروکنترلر چک کنید که چه نوع پین هایی دارد و کدام نوع موتور برای انتخاب شما مناسب است. اگر میکروکنترلر شما دارای پین های ارتباطی سریال است، باید یک کنترلر موتور سریال انتخاب کنید. فرضاً برای متد PWM، برای هر موتور به یک کانال PWM نیاز است.
- نوع کنترلر موتور از نظر کاربرد ، مساله دیگری است که باید به آن توجه شود که شامل دو نوع کنترلر موتور یگانه یا single و دوگانه یا dual می باشد. یک کنترلر موتور دوگانه DC می تواند سرعت و جهت چرخش دو موتور DC را به طور مستقل کنترل کند و سبب می شود تا در هزینه و زمان شما صرفه جویی شود و هچنین موتورها می توانند یکسان نباشند، هرچند در اکثر موارد برای یک ربات متحرک، موتورهای محرک باید یکسان باشند.شما باید کنترلر موتور دوگانه (motor controller dual) را بر اساس قدرتمندترین موتور DC به کار رفته انتخاب کنید. توجه داشته باشید که کنترلرهای موتور دوگانه فقط یک ورودی برق دارند، بنابراین کنترل یک موتور در 6 ولت و دیگری در 12 ولت، امکان پذیر نخواهد بود. این نکته بسیار مهم است که جریان تولیدی کنترلر موتور همیشه به طور یکسان در هر کانال وارد می شود.
کنترلر سروو موتور

سروو موتورهای استاندارد عموما در ولتاژهای 4.8 تا 6 ولت عمل می کنند و میزان جریان مصرفی آنها یکسان است. با این حال، ممکن است که یک سروو موتور در 12 ولت کار کند. اگر سروو موتور انتخابی شما استاندارد نباشد، باید برای انتخاب نوع کنترلر سروو موتور تحقیقات بیشتری انجام دهید. اکثر سروو موتورها از ورودی سروو R/C استاندارد استفاده می کنند که شامل سه سیم متصل به ( زمین ، ولتاژ و سیگنال ورودی ) می باشد.
- متد و روش کنترل را انتخاب کنید. برخی از کنترلرهای سروو موتور به شما این امکان را می دهند که با استفاده از ( شماره گیری ، سوئیچ یا دکمه ها )، موقعیت سروو موتور را به صورت دستی کنترل کنید، در حالیکه برخی دیگر با استفاده از دستورات UART (سریال) یا روشهای دیگر، ارتباط برقرار می کنند.
- تعداد سروو موتورها را تعیین کنید. کنترلرهای سروو موتور می توانند تعدا زیادی سروو موتور (معمولاً 8 ، 16 ، 32 ، 64 و بالاتر) را کنترل کنند. در واقع باید کنترلری انتخاب کنید که بتواند تمام سروو موتورها را کنترل کند.
- در اینجا هم همانند کنترلرهای موتور DC ، انتخاب متد و روش کنترل ، یک مساله مهم است.
کنترلر استپ موتور

- موتور انتخابی شما تک قطبی یا دو قطبی است؟ نوع کنترلر استپ موتور را باید بر اساس نوع موتورتان انتخاب کنید، هر چند اکثر این کنترلرها قادر به کنترل هر دون نوع استپ موتور هستند. معمولا بر اساس تعداد لیدها می توان نوع موتور را تشخیص داد فرضاً اگر موتور دارای 4 لید باشد، دو قطبی و در صورت داشتن 6 لید یا بیشتر تک قطبی است.
- دامنه ولتاژ کنترلر موتور را بر اساس ولتاژ اسمی موتور انتخاب کنید.
- میزان جریان مورد نیاز هر سیم پیچ موتور را تعیین کنید و مشخص کنید که کنترلر استپ موتور چه میزان جریان در هر سیم پیچ می تواند تولید کند. اگر نمی توانید میزان جریان در هر سیم پیچ را تعیین کنید، اکثر تولید کنندگان، مقدار مقاومت سیم پیچ ، R را بر روی موتور ثبت می کنند و شما می توانید با استفاده از قانون اُهم ( V=RI ) مقدار جریان را محاسبه می کنید.
- در اینجا هم همانند کنترلرهای موتور DC ، انتخاب متد و روش کنترل ، یک مساله مهم است.
موتور محرک خطی

موتورهای محرک خطی را می توان بر اساس روش کنترل به سه دسته تقسیم کرد: موتورهای خطی DC ، R/C و بازخورد موقعیت. اکثر موتورهای محرک خطی DC از یک موتور گیربکس DC استفاده می کنند، بنابراین باید یک کنترلر موتور DC انتخاب کرد. البته برخی از موتورهای محرک خطی از متد سروو R/C استفاده می کنند، که در اینصورت باید از یک کنترلر سروو موتور استفاده کرد. اگر یک موتور محرک خطی R/C با ولتاژی بالاتر از ولتاژ تولیدی کنترلر سروو موتور عمل کند، باید سیم های متصل دیگری نیز برای تأمین ولتاژ مورد نیازش داشته باشد.
کنترلر سایر موتورهای محرک
اکثر محرک ها مانند سیم عضلانی ، شیر برقی و غیره، باید توسط کنترلر موتور ، کنترل شوند.
برای اینکه متوجه شوید که موتور محرک مورد نظر به کنترلر نیاز دارد یا خیر، به نکات زیر دقت کنید:
- نیاز به جریان زیاد : هر موتوری که به جریان بیش از 0.1 آمپر نیاز داشته باشد، باید از کنترلر استفاده کند.
- نیاز به ولتاژ زیاد : اگر موتور محرک در ولتاژی بالاتر از ولتاژ میکروکنترلر (معمولاً 5 ولت یا 3.3 ولت) کار کند، موتور را نمی توان مستقیماً به میکروکنترلر وصل کرد و نیاز به یک واسطه ( یا همان کنترلر ) دارد.
مثال عملی

در بخش سوم ، برای حرکت ربات تانک از دو موتور گیربکس 6 و 3 ولت پلاستیکی ، استفاده کردیم که مشخصات کامل آنها را در زیر آورده ایم :
- نسبت چرخدنده : 143:1 ( که از نوع کاهنده می باشد ).
- گشتاور در حالت بی بار ( 3 ولت ) : 40 ( rpm )
- گشتاور در حالت بی بار ( 6 ولت ) : 78 ( rpm )
- جریان در حالت بی بار ( 3 ولت ) : 50 میلی آمپر
- جریان در حالت بی بار ( 6 ولت ) : 52 میلی آمپر
- جریان ایستا ( Stall Current ) ( 3 ولت ) : 400 میلی آمپر
- جریان ایستا ( Stall Current ) ( 6 ولت ) : 700 میلی آمپر
- گشتاور ایستا ( Stall Torque ) ( 3 ولت ) : 3.20 ( kg.cm )
- گشتاور ایستا ( Stall Torque ) ( 6 ولت ) : 5.49 ( kg.cm )
انتخاب نوع کنترلر با توجه به مشخصات موتور
- ولتاژ اسمی 3 ولت و 6 ولت است.
- هیچ اشاره ای به جریان دائمی نشده، اگرچه گشتاور ایستا در هر دو ولتاژ ، مقادیر 400 و 700 میلی آمپر آورده شده که اگر 25٪ از این مقادیر را محسابه کنیم، جریان دائمی را می توان به صورت تقریبی محاسبه کرد که به ترتیب مقادیر 100 و 175 میلی آمپر می باشد.
- میکروکنترلر انتخابی ما دارای پین های مختلفی از جمله سریال ، PWM ، آنالوگ و دیجیتال است.
- ربات کوچک ما از دو موتور یکسان استفاده خواهد کرد، بنابراین می توانیم از یک کنترلر موتور دوگانه استفاده کنیم.
- با توجه به معیارهای فوق، ما به دنبال کنترلر موتور با مشخصات زیر هستیم:
- محدوده ی ولتاژ بین 3 تا 6 ولت باشد.
- جریان دائمی حداقل 350 میلی آمپر برای هر کانال باشد.
- متد ارتباطیPWM ، I2C یا آنالوگ است.
- کنترلر موتور دوگانه از نظر کاربردی گزینه مناسبتری می باشد.
با توجه به معیارهای بالا، کنترلرهای موتور DC زیر در لیست انتخابی قرار گرفتند :
- RB-Dim-19( 18-6 ولت، 5 آمپر، دوگانه، با متد ارتباطی آنالوگ و سریال )
- RB-Pol-16 ( 6-1.5 ولت، 5 آمپر، دوگانه، با قیمت پایین و متد ارتباطی سریال )
- RB-Pol-22 ( 16-6 ولت، 9 آمپر، دوگانه ، با متد ارتباطی PWM )
- RB-Spa-397 ( 16-5 ولت، 2 آمپر، دوگانه، با متد ارتباطی سریال )
- RB-Ada-02( 36-4.5 ولت، 0.6 آمپر، دوگانه، مناسب برای میکروکنترلر آردوینو با متد ارتباطی PWM )
- RB-Cri-15( 58-6 ولت، 10 آمپر، یگانه، PWM )
- RB-Cri-14 ( 58-6 ولت، 10 آمپر، یگانه، PWM )
برای کاهش این لیست، میزان هزینه و ویژگی های خاص هر کدام را باید در نظر گرفت. به عنوان مثال، کنترلرهای با جریان تولیدی بالا ( 10 آمپر ) را می توانیم از لیست حذف کنیم چرا که از کنترلرهای 5 آمپری بسیار گرانتر هستند. همچنین می توانیم تمام کنترلرهای یگانه را نیز از لیست حذف کنیم.
انتخاب نهایی
در لیست بالا هرچند که کنترلر RB-Ada-02 به خصوص برای میکروکنترلر آردوینو طراحی شده ولی محدوده ولتاژ آن برای موتورهای ما مناسب نیست و جریان بسیار کمی نیز تولید میکند و قیمت آن نسبتا بالا می باشد ولی کنترلر RB-Pol-16 به دلیل قیمت پایین آن و محدوده ولتاژ مناسب آن با توجه به موتورهای مورد استفاده در این پروژه ( 3 و 6 ولت ) از همگی مناسبتر است.

ادامه این پروژه را در بخش ششم (چگونه ربات را کنترل کنیم؟) مطالعه کنید.






{kind=link}