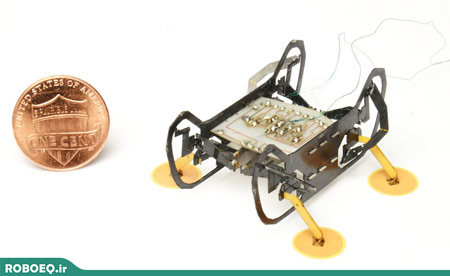
میکرو ربات HAMR-E چهار پا دارد که قادر است بر روی سطوح مختلف عمودی، منحنی و به صورت واژگون حرکت کند.
بعضی موتورهای جت بالای 25 هزار قطعه دارند که حفظ و نگهداری از آنها کاری خسته کننده و وقت گیر است. بسیاری از اجزای اصلی آنها در عمق موتور قرار گرفته اند و نمی توان بدون جدا کردن موتور، آنها را مورد بررسی و بازرسی قرار داد. مضاف بر اینکه زمان و هزینه نگهداری زیاد است. این مسئله فقط به موتورهای جت محدود نمی شود و بسیاری از ماشینهای پیچیده و گرانقیمت مثل تجهیزات ساخت و ساز، ژنراتورها و تجهیزات علمی نیاز به سرمایه گذاری های هنگفتی برای بازرسی و نگهداری دارند.
محققان موسسه ویز در دانشگاه هاروارد، یک میکرو ربات با پد های چسبنده، مفصل مچ پای اریگامی و شیوهی راه رفتن مخصوص طراحی کرده اند که اجازه می دهد این ربات بر روی سطوح رسانای عمودی و به صورت واژگون در دیواره ای داخلی موتورهای تجاری حرکت کند.
یکی از پژوهشگران این تحقیق بیان داشته در حال حاضر این رباتها می توانند در سه بُعد حرکت کنند. آنها می توانند در یک روز به بازرسی غیر تهاجمی ماشین آلات بزرگ بپردازند و در وقت و هزینه نگهداری آنها صرفه جویی کنند.
این میکرو ربات که HAMR-E نام گرفته است، پاسخی است به این چالش که آیا امکان طراحی و ساخت ارتش رباتهای کوچک برای گسیل به بخشهای داخلی موتور جت که نیروی انسانی دسترسی به آن ندارد، وجود دارد؟
رباتهای کوهنورد موجود می توانند در سطوح عمودی حرکت کنند اما برای حرکت واژگون دچار مشکل میشوند و برای اینکار نیاز یه یک نیروی بزرگ چسبنده دارند که از سقوط آنها جلوگیری کند.
میکرو ربات HAMR-E چهار پا دارد که قادر است بر روی سطوح صاف و شناور بر روی آب حرکت کند. محققان مجبور به حل یکسری از چالشها شدند تا HAMR-E بتواند بر روی سطوح عمودی، منحنی و به صورت واژگون روی موتور جت حرکت کند.
آنها به پدهای چسبنده ای نیاز داشتند که بتواند ربات را حتی به صورت واژگون نگه دارد، در عین حال بتواند با بالا و پایین بردن آنها حرکت کند (راه برود). این پدها شامل الکترود مسی پلی آمید عایق شده است که امکان تولید نیروی الکتریکی بین پدها و سطح رسانای زیر آن را دارد. پدها می توانند به سادگی با قطع و وصل میدان الکتریکی جدا و یکی شوند که در یک ولتاژ همسان که برای حرکت پاهای ربات نیاز است عمل می کند، بنابراین نیاز به نیروی اضافی خیلی کمی دارند.
محققان همچنین برای HAMR-E مفاصل مچ پا را به صورتی ساختند که در سه جهت بچرخد تا جبران چرخش پاها را در طی حرکت باشد و اجازه بدهد با حفظ جهتش از سطح بالا برود. مفاصل از فایبرگلاس لایه ای و پلی امید ساخته شده اند. تا خورده در یک سطح اریگامی شکل که اجازه می دهد مچ پا، مجزا از پا بچرخد و برای صعود HAMR-E با زمین همتراز شود.
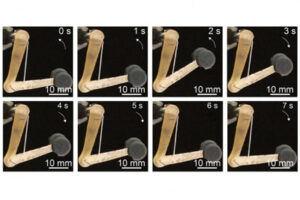
در نهایت، محققان الگوی راه رفتن مخصوصی برای HAMR-E طراحی کردند که در همه زمانها برای جلوگیری از افتادن یا سُر خوردن، به تماس سه پد با سطح عمود یا واژگون نیاز دارد. یک پا از سطح جدا میشود و به جلو خم می شود و دوباره سر جای خود قرار می گیرد در حالیکه سه پای دیگر روی سطح قرار گرفته اند. در این شرایط گشتاور کمی برای نگهداری و حرکت ربات صرف میشود. فرایند حرکت برای سه پای دیگر به ترتیب با تغییر میدان الکتریکی اجرا می شود و ربات روی سطح حرکت میکند.
در هنگام تست HAMR-E در سطوح عمودی و واژگون، HAMR-E توانست بیش از 100 گام بدون جدا شدن از سطح حرکت کند. این ربات در مقایسه با دیگر رباتهای کوچک کوهنورد در سطوح واژگون حرکت میکند. در سطوح عمودی از آنها کندتر است اما به طور قابل توجهی در سطوح افقی سریعتر عمل میکند. این ربات کاندیدی مناسب برای کاوشهای محیطی در سطوح مختلف است. همچنین قادر است در سطوح افقی چرخش 180 درجه داشته باشد.
HAMR-E توانسته روی بخشهایی از موتور که منحنی هستند، حرکت کند و با افزایش ولتاژ الکترودهای چسبنده از مسیرهای ناهموار موتور عبور کند.
این گروه در حال تداوم تحقیقات و طراحی سنسورها هستند تا پاها بتوانند از افتادن ربات در سطوح عمودی و واژگون جلوگیری کنند. HAMR-E ظرفیت آن را دارد که بیشتر از وزن خود را حمل کند و سایر قطعات الکتریکی را منتقل کند و با سنسورها، محیطهای مختلف را مورد بررسی قرار دهد. این گروه همچنین در حال بررسی برای استفاده از HAMR-E در سطوح غیر رسانا هستند.
این نوع رباتها در آینده می توانند در کاوشهای هر نوع زیر ساختی مثل ساختمانها، ژنراتورها، لوله، …. بکار گرفته شوند.