
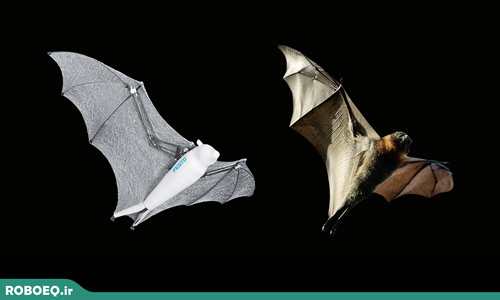
مهندسان Festo رباتی را با الهام از حیوانی غیر معمول به نام روباه پرنده ساختند. روباه پرنده نوعی خفاش میوه خوار است. یکی از ویژگیهای منحصر به فرد این پرنده، پوست الاستیکی نرمی است که از استخوانهای انگشت تا مفاصل پا را در بر گرفته است. هنگام پرواز انحنا پوست توسط انگشتان تنظیم میشود به همین دلیل حرکت آئرودینامیکی و نرمی در هوا دارند. و هنگام پرواز می توانند آهسته اوج بگیرند.
سینماتیک چابک مطابق با الگوی واقعی
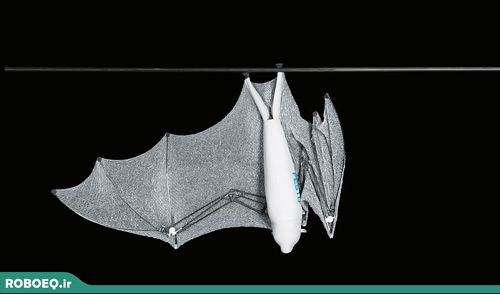
طول بالهای این روباه پرنده ساخته شده 228 سانتی متر، طول بدنه 87 سانتی متر و وزن آن 580 گرم است. این موجود ساخته دست بشر به لطف ترکیب سیستم مجتمع on-boardو سیستم ردیاب حرکت خارجی، قادر است در محدوده تعریف شده حرکتی نیمه مستقل داشته باشد.
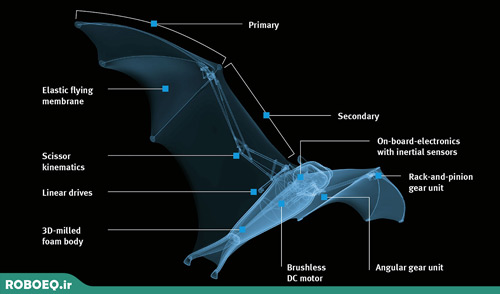
ساختار BionicFlyingFox
مشابه روباه پرنده طبیعی، حرکت بالها به دو بخش اولیه و ثانویه تقسیم و با یک لایه الاستیکی از بالا تا پایین پوشش داده میشود. مشابه مدل بیولوژیکی این موجود، همه مفاصل می توانند به صورت مجزا کنترل شوند و بالها به صورت مجزا باز و بسته گردند.
لایه الاستیکی یک ویفر نازک و فوق سبک اما بسیار محکم است. و شامل یک لایه غشاء غیر قابل نفوذ هوا و پارچه ای الاستیکی است که در 45000 نقطه به هم جوش خورده اند. با توجه به انعطافپذیری، تقریبا بدون چین و شکن است حتی زمانیکه بالها به عقب کشیده میشوند. ساختار لانه زنبوری پوسته از ایجاد ترکهای کوچک در هنگام کشیده شدن بالها جلوگیری میکند. حتی اگر این پوسته آسیب جزئی ببیندBionicFlyingFox قادر به پرواز خواهد بود.

پروازی نیمه مستقل در یک فضای تعریف شده
این پرنده قادر است در یک فضای مشخص به صورت نیمه مستقل حرکت کند و با سیستم ردیابی حرکت مرتبط شود. موقعیت پرنده به صورت دائم ثبت می شود و سیستم مسیر پرواز را مشخص میکند و دستورات لازم را برای آن مسیر میدهد. یک نفر شروع و فرود این پرنده را به صورت دستی انجام میدهد. اما پرواز به صورت اتوماتیک انجام میشود.
حرکت دوربینها برای تعیین موقعیت دقیق پرنده
بخش اصلی سیستم ردیابی حرکت از دو دوربین مادون قرمز تشکیل شده که بر روی پایه دوربین قرار گرفته است. این دوربینها قادرند بچرخند، کج شوند به طوریکه کل پرواز BionicFlyingFox را از زمین ردیابی کند. دوربینها روباه پرنده را با چهار نشانگر فعال مادون قرمزی که در دو بال و پاهای روباه قرار گرفته است، تشخیص می دهند.

یادگیری ماشین (Machine learning) از مسیر پرواز ایده آل
تصاویر این دوربینها به کامپیوتر مرکزی ارسال میشود. این داده ها ارزیابی میشوند. پرواز مشابه یک کنترل کننده ترافیک هوا، هماهنگ میشود. علاوه بر آن مسیرهای پیش برنامه ریزی شده در کامپیوتر ذخیره میگردند تا هنگامیکه برای مانوری برنامه ریزی شده است، مسیر پرواز را مشخص کنند.
روباه پرنده الگوریتم های کنترل مورد نیاز را از کامپیوتر اصلی دریافت میکند، آنها را به صورت خودکار آموخته و یه صورت دائمی بهبود میدهد. روباه پرنده قادر است رفتار خود را در طول پرواز بهبود بخشد.




{kind=link}