کنترل PID
کنترلگر نسبی مشتق انتگرال (PID)کنترلگری است که به شیوه مشترک برای ربات های کنترل کننده به کار گرفته میشود . مطالعات در رابطه با PID برای طراحی هر چه بهتر نسبت های کنترل ربات موثر است .
در شکل زیریک دیاگرام کنترل حلقه بسته(سیکل کامل) را مشاهده می کنید.
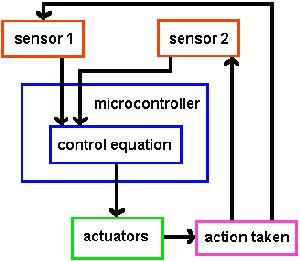
هدف از سیستم کنترل بکارگیری محرک های ربات این است که بخواهیم عامل کنترل داشته باشیم .یک سنسور (معمولا یک رمزگشا در محرک) تعیین می کند که چه چیزی درحال تغییر است ، برنامه ای که برای آن می نویسید تعیین میکند که نتیجه بایستی چطور باشد و محرک هم در واقع آن تغییر را اعمال میکنند . سنسور دیگر محیط را حس میکند و ربات را قادر میسازد که به کجا برود .
واژگان و اصطلاحات فنی
برای شروع کار ، در اینجا تعدادی واژگان آمده است که بهتر است با آنها آشنا شوید :
Error: خطا و اشتباه که وسیله درحال حاضر قادر به انجام آن نیست برای مثال اگر ربات در 3متر در ساعت درحال حرکت است، ولی شما می خواهید که 2متر در ساعت حرکت کندerror به این صورت خواهد بود:
3mph-2mph = 1mph
یا فرض کنید که ربات در موقعیت x=5 است ولی شما میخواهید که در موقعیت x=7 باشد بنابراین خطای آن تفاضل آن یعنی 2 خواهد بود .
یک سیستم کنترل اگر هیچ خطایی نداشته باشد.، ابتدا در مورد آن می اندیشد ، اگر ربات هرآنچه می خواهید را انجام داد دیگری نیازی به کنترل نخواهد داشت !
Proportional =P: اصطلاح نسبیت به طور نمونه همان خطا خواهد بود .و معمولا مربوط به مسافتی است که شما از یک ربات می خواهیدتا طی نماید ویا شاید شرایط دمایی است که میخواهید محیط در آن دما باشد.
Derivative =D: اصطلاح مشتق به معنی تغییر خطای ایجاد شده در دوره تناوب زمانی (t) است. و بیشتر مربوط به سرعت ربات میباشد .بنابراین اگر ربات شما در موقعیت x=5 قبل از یک دوره زمانی t باشد ، و حال در موقعیت x=7 است بنابراین مشتق آن برابر 7 – 5 = 2/t است . اگر از یک میکروکنترلر استفاده میکنید می توانید ازبخش مطالعهTIMER بهره بگیرید .
Integral =I: اصطلاح انتگرال میزان تغییرات ایجاد شده در خطا در طول دوره تناوب زمانی (t) می باشد. معمولا شتاب ربات را شامل میشود. اگر این مقداردر یک ثانیه قبل، برابر 2/t باشد و هم اکنون هم 2/t باشد بنابراین انتگرال برابر با 2 – 2 = 0/t^2 خواهد بود که خطای شتاب برابر با صفر خواهد بود .
ak constant–gain: ثابت تنظیم ( بهره): PID بایستی در کد شما تنظیم گردد . خیلی از چیزها در ربات وجود دارد که الگوسازی آنها به صورت ریاضی دشوار است (لغزش زمین ،اندوکتانس موتور ، مرکز جرم ،که باعث بهم پیوستگی ربات می شود). بنابراین اغلب اوقات بهتراست تا فقط یک رباتی با معادله کنترل تکمیل میشود را داشته باشیم .سپس رابطه را تنظیم کرده تا ربات به در