
شناسه 0101027


تصویر ممکن است تفاوتهای جزیی با کالای اصلی داشته باشد. اما این تفاوتها تاثیری بر عملکرد و کارایی آن ندارند.
بهترین فروشندگان براساس قیمت تعدادی
| 1 | نورا الکترونیک | 11,100,000 |
| نام فروشنده داخلی | ۱+ عدد | ۵+ عدد | ۱۰+ عدد | ۲۵+ عدد | ۵۰+ عدد | ۱۰۰+ عدد | ویژگیها | ||
|---|---|---|---|---|---|---|---|---|---|
| نورا الکترونیک | 3 | 11,100,000 | 11,100,000 | 11,100,000 | 11,100,000 | 11,100,000 | 11,000,000 | سلامت فیزیکی و فنی کالا ارسال از روبوایکیو ۴ روز کاری دیگر |
مستندات فنی
| عنوان | مقدار |
|---|---|
| کاتالوگ | دانلود |
| وزن | ۹۸/۹۲ گرم |
| طول | 66.7 mm |
| قطر گیربکس | 24.8 mm |
| نوع موتور | DC گیربکس دار انکودر دار |
| جنس شافت | فلزی |
| نوع گیربکس | ساده |
| تعداد شافت | 1 |
| جنس گیربکس | فلزی |
| قطر | 25 mm |
| ارتفاع گیربکس | 22.9 mm |
| قطر موتور | 25.5 mm |
| مدل | 25GA370 |
| طول موتور | 32 mm |
| طول شافت | 9.6 mm |
| قطر شافت | 4 mm |
| رزولوشن انکودر در شافت موتور | 400 C/R |
| ولتاژ انکودر | 3.3 V |
| ولتاژ تغذیه | 12 V |
| دور خروجی | 330 RPM |
| حداکثر گشتاور | 0.9 kgf.cm |
توضیحات محصول
توجه : اعداد جدول تقریبی هستند.
این موتور گیربکس با ولتاژ 12 ولت در حالت بهینه کار میکند . در صورتیکه ولتاژ کمتر از 12 ولت استفاده کنید دور خروجی و توان و نهایتا گشتاور تولیدی موتور کاهش میابد . از طرفی در صورتیکه برای این موتور از ولتاژهای بیشتری استفاده کنید ممکن است به دورها و یا گشتاورهای بالاتر دسترسی یابید ولی مطمئنا عمر موتور بسیار کوتاه تر شده و سریعتر از بین میرود.
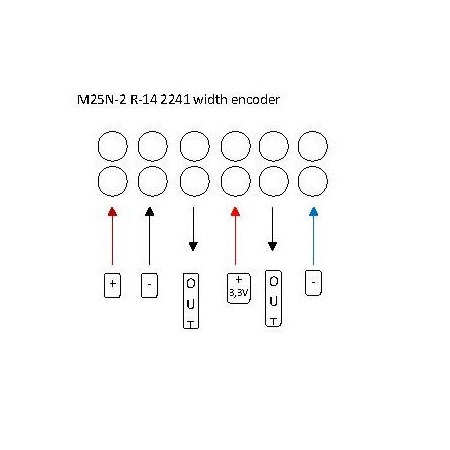
وجود گیربکس بر سر راه موتور باعث شده که بتوان به گشتاور بیشتری دست پیدا کرد . ولتاژ ورودی موتور بصورت DC است . موتور دارای 2 پین ورودی است که کنار یکی از پینها رنگ قرمز قرار دارد که پایه + و دیگری پایه - است . با وصل کردن ولتاژ به پایه ها موتور در جهت عقربه های ساعت میچرخد . در صورتیکه جای + و - ورودی پایه ها را عوض کنید جهت چرخش موتور تغییر میکند.
به همین راحتی میتوانید جهت چرخش روبات خود را تغییر دهید و یا روباتتان براحتی دور بزند .
در صورتیکه از دورهای بالاتر موتورها استفاده کنید ربات شما با سرعت بیشتر حرکت میکند و قدرت کمتر و در صورتیکه از موتور دور پایین استفاده کنید ربات شما با سرعت کمتر وبا قدرت بیشتری حرکت میکند . البته موارد دیگری نیز در این امر اهمیت دارد مثل چرخ ربات شما برای انتخاب موتور حتما به ولتاژ و گشتاور و دور موتور دقت کنید.
به همین راحتی میتوانید جهت چرخش روبات خود را تغییر دهید و یا روباتتان براحتی دور بزند .
در صورتیکه از دورهای بالاتر موتورها استفاده کنید ربات شما با سرعت بیشتر حرکت میکند و قدرت کمتر و در صورتیکه از موتور دور پایین استفاده کنید ربات شما با سرعت کمتر وبا قدرت بیشتری حرکت میکند . البته موارد دیگری نیز در این امر اهمیت دارد مثل چرخ ربات شما برای انتخاب موتور حتما به ولتاژ و گشتاور و دور موتور دقت کنید.
این موتور دارای انکودر MITSUMI مدل M25N-2R-14 است .
کالاهای مشابه

موتور گیربکس 12 ولت 320 دور
موتور DC
با امکان تامین

موتور گیربکس 12 ولت 350 دور 37GB
موتور DC
با امکان تامین


موتور گیربکس 12 ولت 500 دور مدل ZGA60FM برند LANDA
موتور DC
با امکان تامین

خریداران این کالا
موارد زیر را هم خریدهاند





سوکت 40 پین
سوکت
موجود