

| نام فروشنده داخلی | ۱+ عدد | ۵+ عدد | ۱۰+ عدد | ۲۵+ عدد | ۵۰+ عدد | ۱۰۰+ عدد | ویژگیها | ||
|---|---|---|---|---|---|---|---|---|---|
| روبوایکیو | 0 | 2,500,000,000 | 2,490,000,000 | 2,480,000,000 | 2,470,000,000 | 2,450,000,000 | 2,440,000,000 | سلامت فیزیکی و فنی کالا |
مستندات فنی
| عنوان | مقدار |
|---|---|
| وزن | ۵۰ گرم |
توضیحات محصول
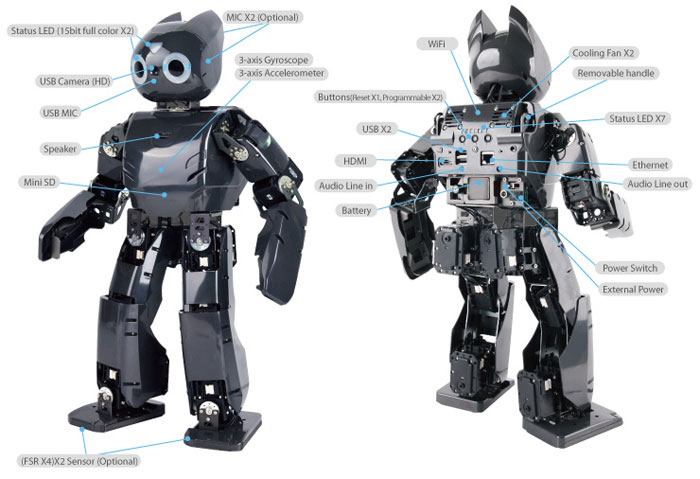
روبات انساننمای فوق پیشرفته DARwIn-OP محصول شرکت ROBOTIS با سرعت پردازش بالا، سنسورهای متنوع، سروموتورهای قدرتی و قابلیت حرکات دینامیک، روباتی بسیار مناسب برای انجام فعالیتهای آموزشی و تحقیقاتی میباشد. این روبات با قوانین لیگ روباتهای انساننما سایز Kid همخوانی دارد. همچنین Platform نرمافزاری و سختافزاری باز این روبات (Open Platform) و قابلیت تعمیر و نگهداری آن توسط خود کاربر از برتریهای آن نسبت به معدود روباتهای انساننمای پیشرفته موجود در بازار جهان میباشد.
کنترل شونده توسط کامپیوتر سریع و قابل حمل با پورتهای متنوع
امکانات پیشرفته با کارآیی بالا
همخوانی با قوانین لیگ روباتهای انساننما (سایز Kid)
دارای مفصلهای ماژولار و قابل تغییر
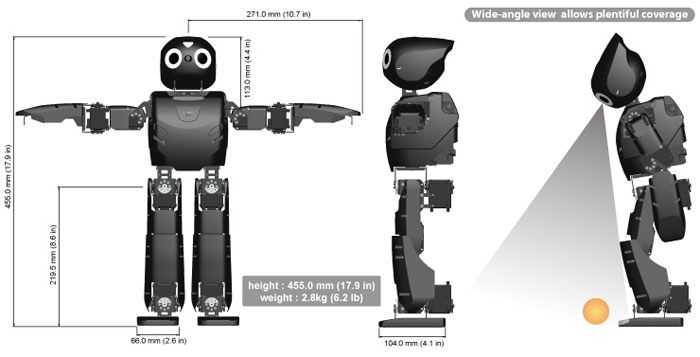
سرعت راه رفتن 24cm/sec، زمان هر گام 0.25 ثانیه (قابل تغییر)
زمان بلند شدن از حالت خوابیده به پشت 3.9 ثانیه و خوابیده به رو 2.8 ثانیه (قابل تغییر)
کامپیوتر داخلی به عنوان کنترلر اصلی: 1.6GHz Intel Atom Z530 دارای 4GB flash SSD
CM-730 یا کنترلر ثانوی: ARM CortexM3 STM32F103RE 72MHz
دارای 20 درجه آزادی (6 درجه در هر پا، 3 درجه در هر دست، 2 درجه در گردن)
یک عدد سروموتور اضافه برای تعمیر و نگهداری یا افزایش درجات آزادی
چرخدندههای فلزی در سروموتور با طول عمر بالا (Dynamixel RX-28M)
کیت با قابلیت تعمیر و نگهداری توسط خود کاربر به همراه دستورالعملهای ساده
حالت Standby برای پایین آوردن مصرف
بهرهگیری از باس داینامیکسل سرعت بالا (4.5Mbps) برای کنترل مفاصل
دارای باطری (برای 30 دقیقه فعالیت)، شارژر و آداپتور برای تغذیه بیرونی
قابلیت اتصال به وسایل جانبی مختلف
دوربین USB زاویه باز با رزولوشن 2MP
دارای ژیروسکوپ سه محوره، شتابسنج سه محوره، سه عدد کلید، میکروفن ردیابی (انتخابی)
امکان ایجاد حرکتهای متنوع به علت ساختار متعادل و متناسب بدن

وزن و ابعاد
.jpg)
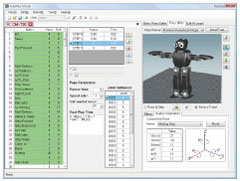
دارای Platform نرمافزاری و سختافزاری باز (Open Platform)
|
اطلاعات مکانیکی (ابعاد، حرکات، دینامیک، اطلاعات CAD) اطلاعات الکترونیکی (کنترلکنندهها، شماتیکها، اطلاعات قطعات) اطلاعات نرمافزاری (محیط توسعه نرمافزار، Framework، کد اصلی برنامه) اطلاعات کاربری (دیاگرامهای اسمبلی با جزئیات، راهنمای تعمیر و نگهداری توسط کاربر) انجمنها (کدهای نوشتهشده توسط کاربران، مثالهای کاربردی متعدد) |
 |
http://sourceforge.net/projects/darwinop
خریداران این کالا
موارد زیر را هم خریدهاند

ماژول فاصله سنج SRF01

ربات انسان نما تخصصی ROBOBUILDER
ربات انسان نما NAO H25

پرینتر سه بعدی MakerBot RP2
پرینتر سه بعدی WANHAO DP4X WOOD CASE
